2022 �� 12 �£��l�� VirtualLab Fusion 2023.1
VirtualLab Fusion 2023�°汾�����ݣ�����
2023.1�汾������һ�[
������Ϣ
VirtualLab Fusion 2023.1�°汾
��Ҫ���·���

VirtualLab Fusion ͨ�^���@�˵Ŀ���������W���g���F������W��ģ
VirtualLab Fusion ���_�l��δֹͣ�� VLF 2023.1*�ṩ��
- ������ٶ�
- ������ʹ��
- �ںϸ���������Wģ��
- ���ߵ�����
- ��Ԫ�ķ�������x��
*�҂��Ŀ͑�ͨ���� VirtualLab Fusion �Q�� VLF�� ��ˣ��ڴ˹��ܸ����У��҂��� VLF 2023.1 ���ڴ�ָ VirtualLab Fusion 2023.1��
���ܸ�������������ݵ�Ԕ����ጺͰ���չʾ����
����ҕ�D
VLF 2023.1����ҕ�D
VirtualLab Fusion 2023.1�����鿴��ʽ
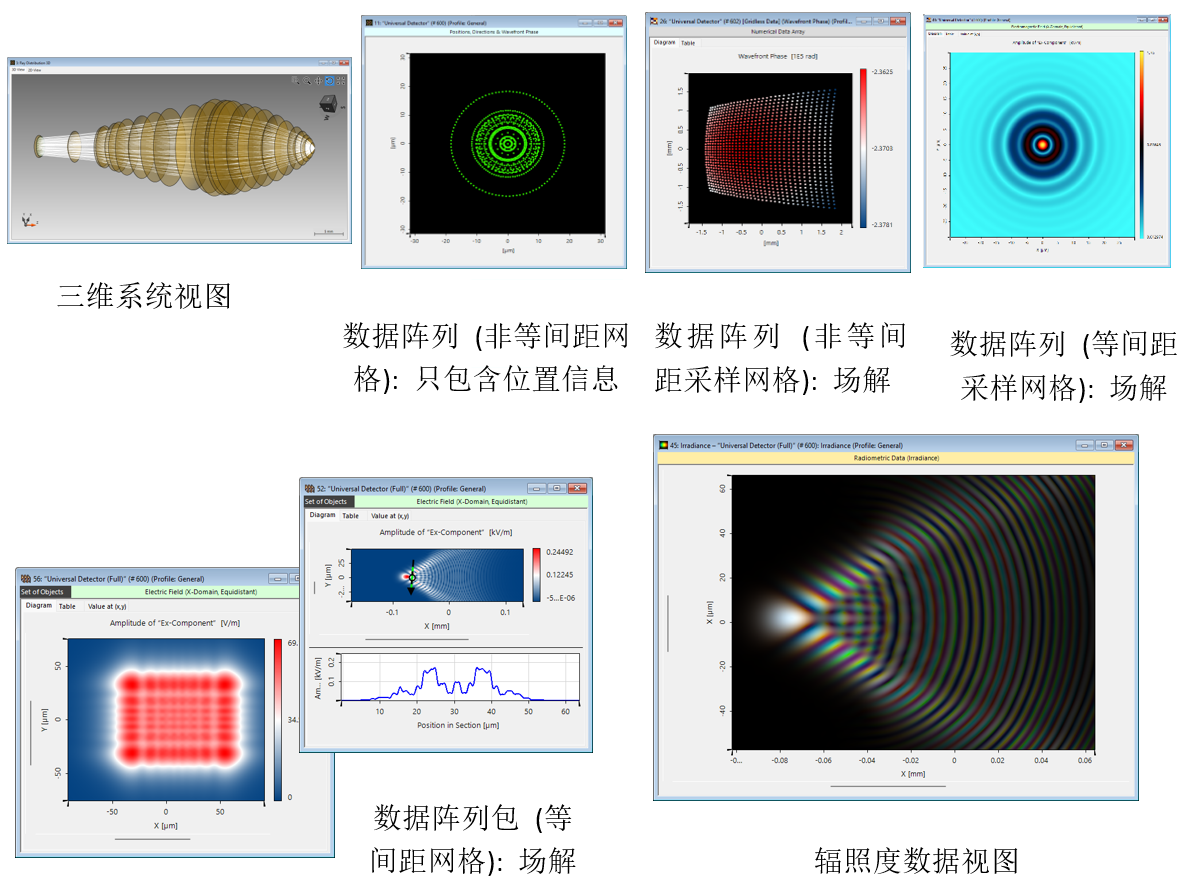
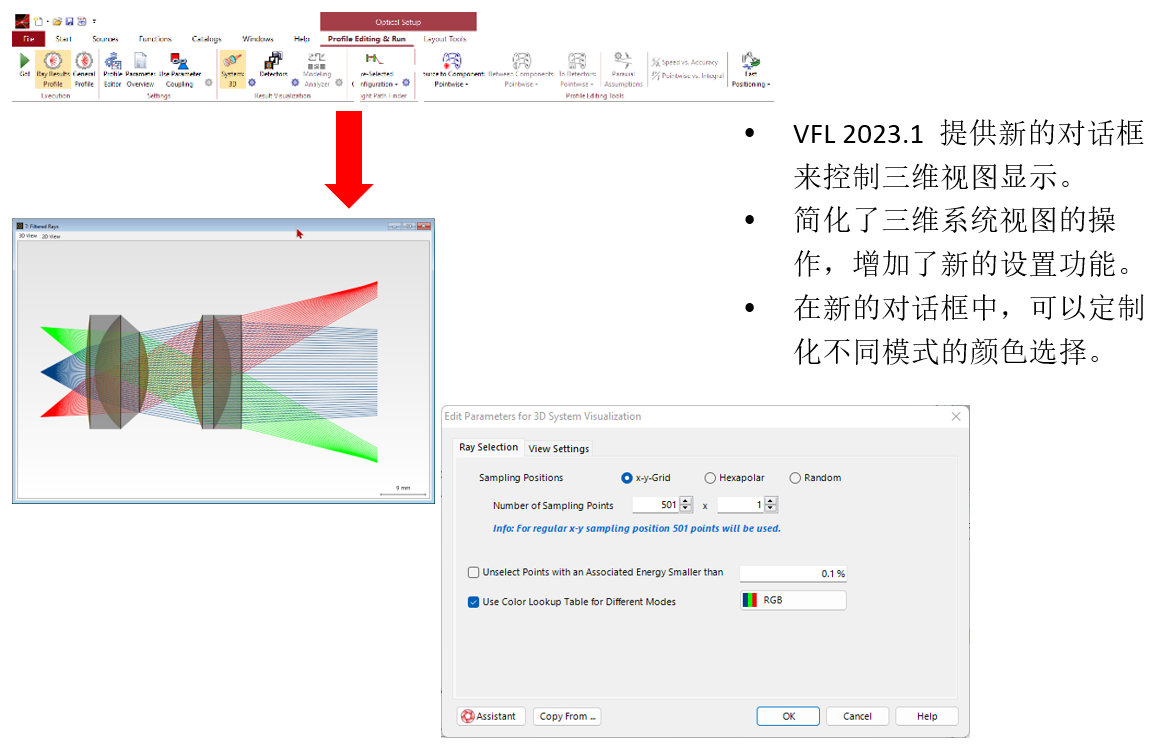
��W����һ���ݔ��1�S��2�S�Ĕ����Y����VLF 2023.1 ���Ô���ҕ�D���ځ��ṩ�Ñ������Y����
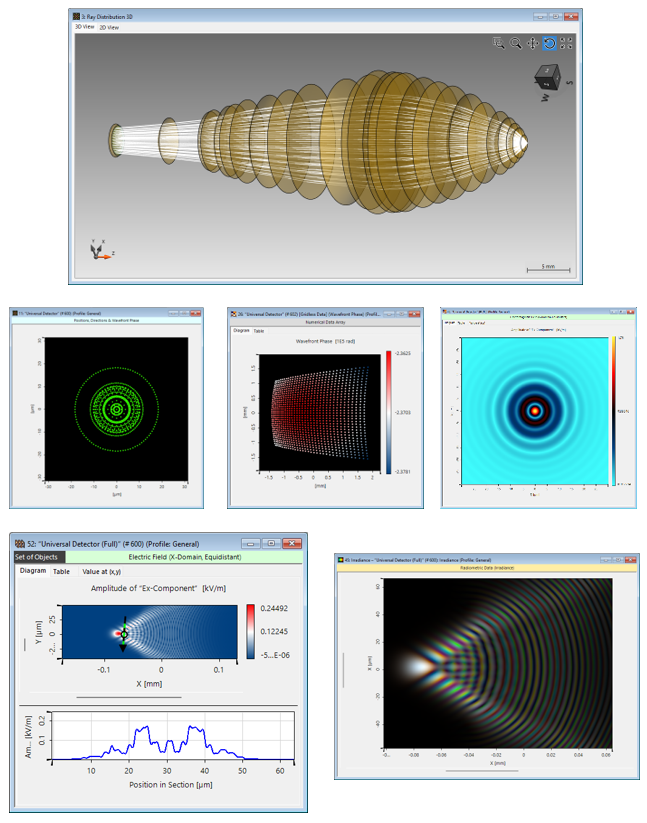
���Sϵ�yҕ�D: �@ʾ�����c���c������ģ�͵�����ӳ�䣬�ṩ�ι⾀�E�ĽY����
�������: �ṩȫ��Ŀ�ҕ�����ߣ�ᘌ�2�S�Լ�3�S���g��ɘӾW��ͷǵ��g��ɘӾW����
��M�������: �ڷ����^���У�̎����ģʽ���߶ನ�L�Ĺ�Wģ�ͣ����Ô�����а��Ɍ����������M�M����һ��
ݗ�䔵��: ��������������ݗ�ն�,ҕ�D���Ը���ɫ�ȌW��ʽ�����ی��ɫ�����г̶��@ʾ��
���Sϵ�yҕ�D: �µČ�Ԓ���Լ��O���x�
�������ҕ�D: ���ؔ���(Pixelated Data)ƽ��
• ̽�y���е�����Խ�٣�̽�y���u���ٶȸ��졣
• Ȼ�����͔��͔���ͨ�����вɘ��^�膖�}�����M�ϲ�ֵ����ʧ�档
• VLF2023.1�����˫@ȡ���⻬�Ŀ�ҕ���������x���Ҍ��ڏ͔��Ͳ�ֵ̎��������Ҫ����IJɘӡ�
����1: �����ֵ���������ֵ�O�ã����磬������ҕ�D���µ��x��ṩ�⻬ҕ�D��������ͨ�^����(Manipulations) ��׃��ֵ��
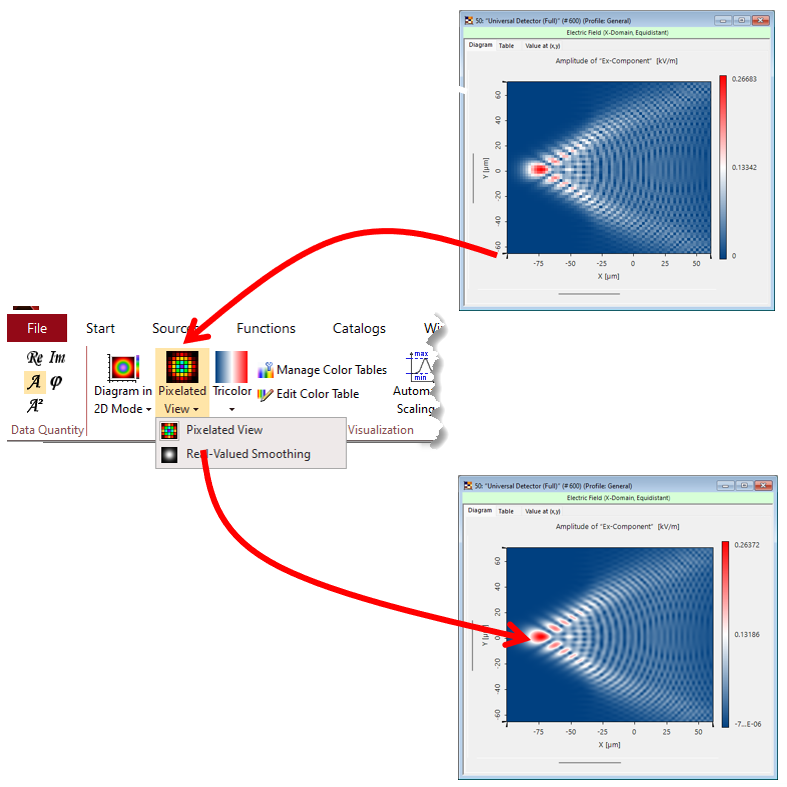
�������ҕ�D: ���ؔ���(Pixelated Data)�⻬��
�͔��͔���ͨ�����вɘ��^�膖�}�����M�ϲ�ֵ����ʧ�档
VLF2023.1�����˫@ȡ���⻬�Ŀ�ҕ���������x���Ҍ��ڏ͔��Ͳ�ֵ̎�����������IJɘ��c����
����2: �͔������������������ֵ���O�ã����܉��ֵҕ�D��interpolated view����ҕ�D�е�ɢ�������ڏ͔���ֵ�е��S�C��λ�����¡������ӵ��x헿���ƽ������е�������֡�
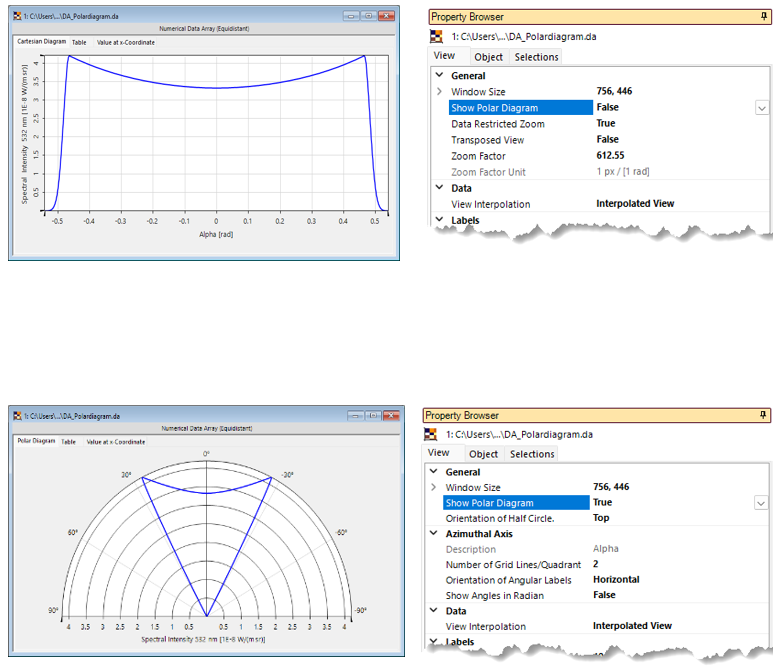
 �������ҕ�D: �O���ˈD(Plolar Diagram)
�������ҕ�D: �O���ˈD(Plolar Diagram)
• һ�S������ֱ�ӏ�̽�y�������ɣ�Ҳ����ֱ�ӄ����Ķ��S��������ȡһ�S������
• VLF 2023.1 �����˘O����ҕ�D�x헣�ᘌ���ه�Ƕ�׃���a����һ�S������
• �ڌ��Ԟg�[��(Property Browser) �п��Ԍ��F�ѿ�������ϵ�Լ��O����ϵ��ҕ�����D����
• �¹��ܿ���ֱ�ӑ������c�Ƕ����P��ݗ���Լ���ȵ�̽�y���С�
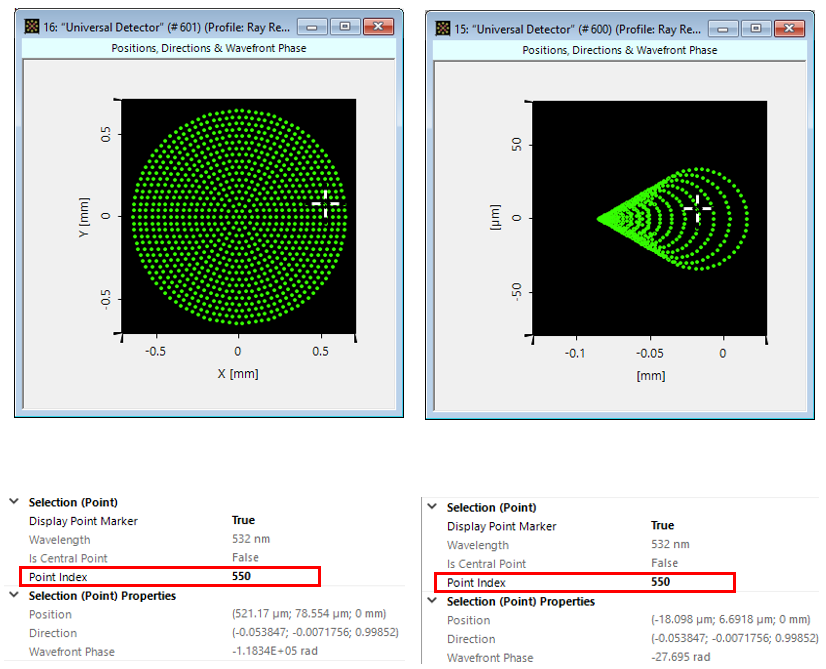
 �������ҕ�D:�Ҍ��Լ��c�Ę��R
�������ҕ�D:�Ҍ��Լ��c�Ę��R
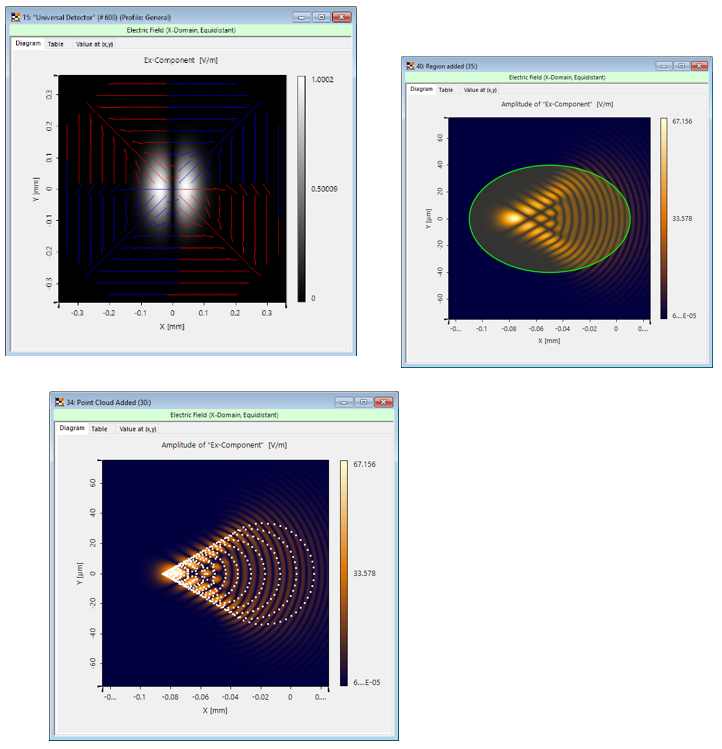
• ᘌ����c���������Ԍ��F���x�ض��c��ۙ��ӳ�䡣
• ���ԣ���VLF2023.1����ҕ�D(data view)�п��Բ鿴�x����c��������
• �ڵ��͵Ĺ��������У��Ñ��ɲ鿴�R����Դ�ϸ��dȤ���c��������V2023.1 �����ṩ��ͬһ��ϵ�y����ͬҕ�D�У�������ͬ�c�����Ŀ�ҕ����
• �`����ӵĔ����D�ι��܌��ڿ������ɽY���ļ����P��Ҫ��
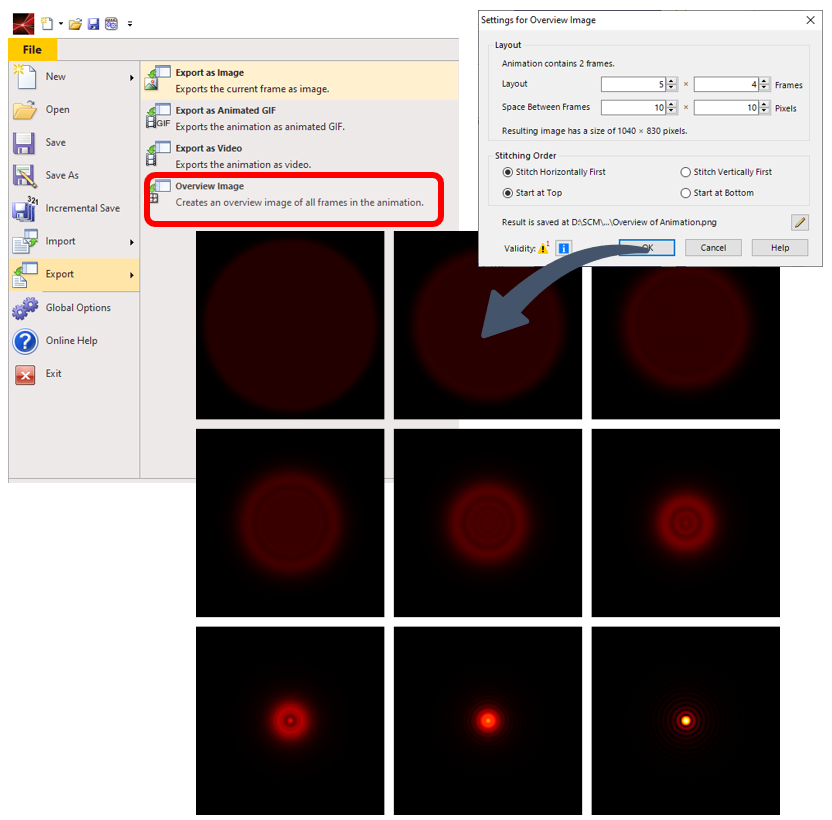
• VLF2023.1������һ���µĹ��ܣ���������з�ʽ�@ʾ�D�νY����
• ��������������ʹ��һ�M�����������λ�D���У�Ȼ�����ԓ�������ɿ��[�D��Overview Image����
 �������ҕ�D: ������¹���
�������ҕ�D: ������¹���
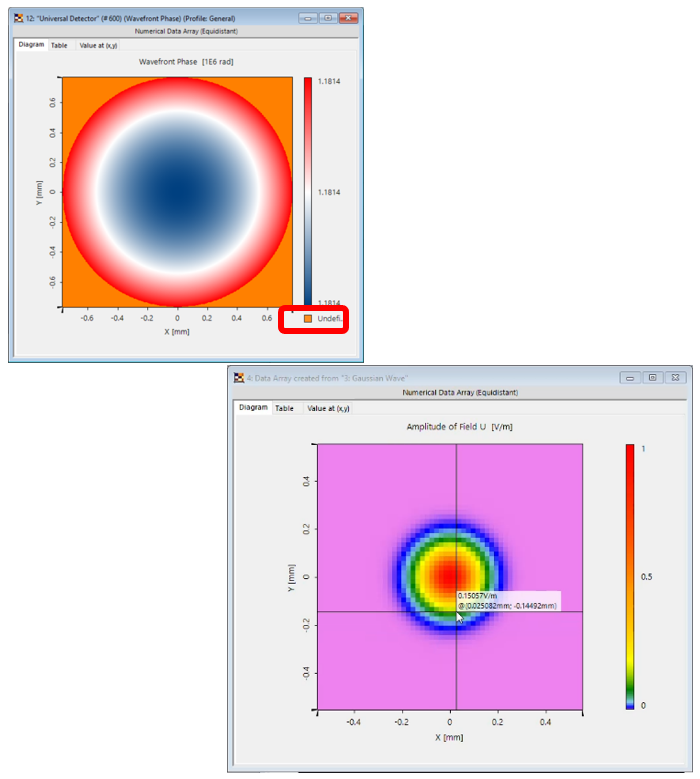
• VFL2023.1���Ԍ�δ���x�^����䲻ͬ���ɫ��
• VLF2023.1����������˶�λ���ڶ�λ�c���@ʾλ�������Լ�ԓλ�Ì����ą���ֵ��
 Graphics Add-ons�ṩ��������ҕ�D�x��
Graphics Add-ons�ṩ��������ҕ�D�x��
• �����ṩ�P�ڹⱾ���Ĕ���ҕ�D������������Լ���λ��ݗ�ն�֮�⣬�e����ϢҲ�������ӵ�����ҕ�D�С�
• VLF2023.1 �ЈD��M���ṩ���ڔ������ҕ�D�������~��Ĕ�����Ϣ�Ĺ��ܡ�
• ԓ��ʽ���Ը��ձ鑪���ڔ���ҕ�D�а���Խ��Խ��ĎΌ���
Graphics Add-ons�ṩ����ҕ�D�x�� |