VirtualLab Fusion��Ԫ����W����ƽ�_ԭ������
VirtualLab Fusion��Ԫ����W����ƽ�_�ǵ�LightTrans��˾�Ԉ��E�����_�l������һ���Ԫ����W����ƽ�_���伯���ˏĎι�W��������W���Ľ��Ƶ�����ĸ��N����˹�f�������������LPIA���ֲ�ƽ�������ƣ���LLGA���ֲ����Թ�Ž��ƣ���RK-BPM���������������ݔ��������TEA����Ԫ���ƣ���FMM/RCWA�������~ģ�B��/������ϲ������ȣ��܉�����R���������桢�����R��ȫϢԪ����GRIN�R�Լ���ź�Meta-Grating�ȸ��Ԫ���M�з���ͷ������Լ���Geometric���Σ���SPW��ƽ�沨�V����Fresnel������������Far Field���h������Rayleigh Sommerfeld��������ī�ƣ��ȣ��܉��N���ɿ��g��ݔ�M��Ӌ�㡣ͬ�r��VirtualLab Fusion߀�ṩ�����N����׃�Q����������FFT�����ٸ����~׃�Q����Semi-Analytical FT������������~׃�Q���Լ�Pointwise FT�����c�����~׃�Q�������ڰ������WԪ�����������s�Ĺ�Wϵ�y��ͨ�^�������E���ܣ��������������B����������ͨ�^�x����m�ĸ����~׃�Q���������ڿ��g����߿��g�l�����M�й����ݔӋ�㣬�Ķ��܉��ڱ��CӋ�㾫�ȵ���r�£�������������ϵ�y�ķ���ͷ������Ԍ��F��Ԫ����W���档�����������^���У������]���N������WЧ��������桢���䡢��ƫ������Լ�ʸ��Ч���ȡ�
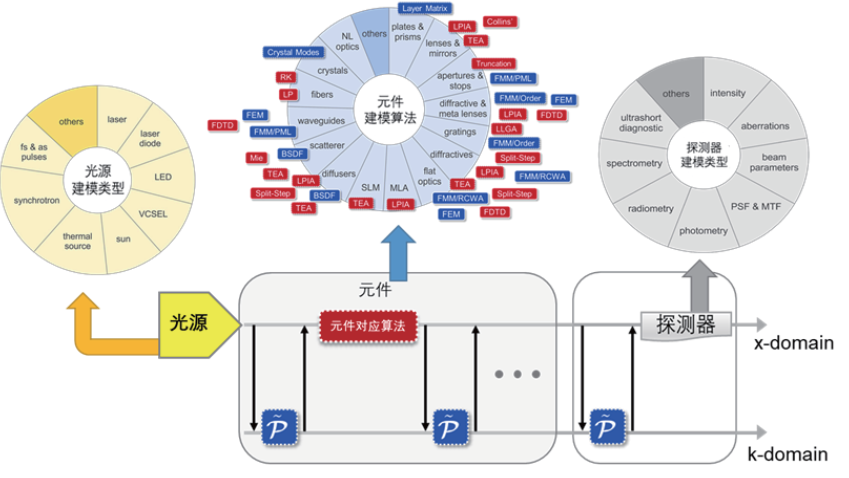
��Ԫ����W����ƽ�_�ķ���ԭ��
VirtualLab Fusion ��Ԫ����W����ƽ�_�Ľ�Q����
VirtualLab Fusion���Ñ����������ڲ������L�đ��÷����ȵ�ͻ���Լ��g�����������������½�Q����:
• �Rϵ�y
• ����ϵ�y��fs/as�}�_
• ���w���
• �����W
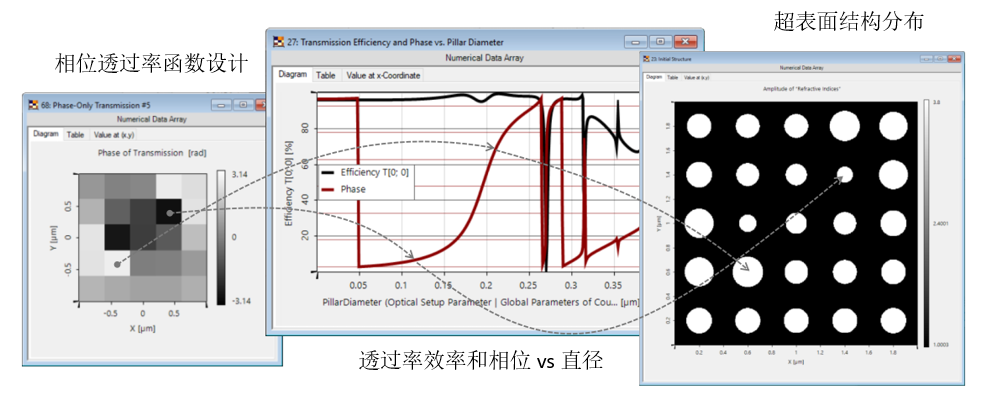
• ���& Metasurfaces
• �R���
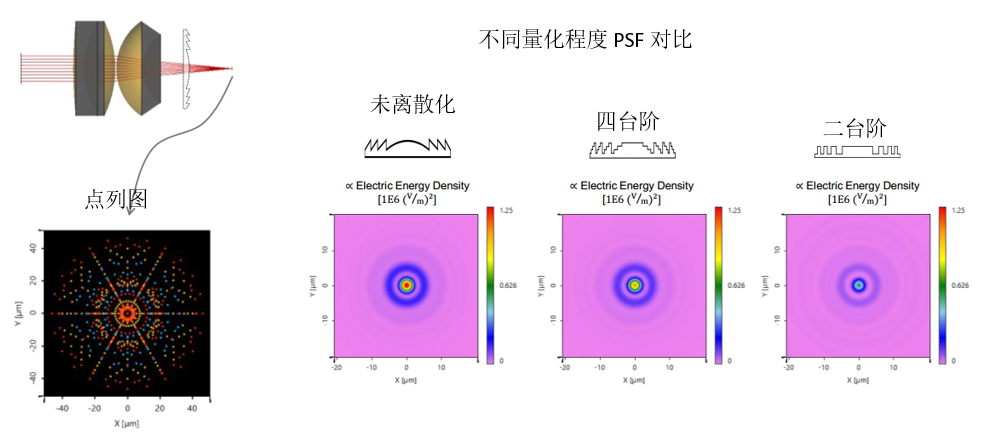
• �UɢƬ��DOEs
• AR / VR / XR���R
• ɢ��
• ����
VirtualLab Fusion��Ԫ����W����ƽ�_���`���Խ�ģ
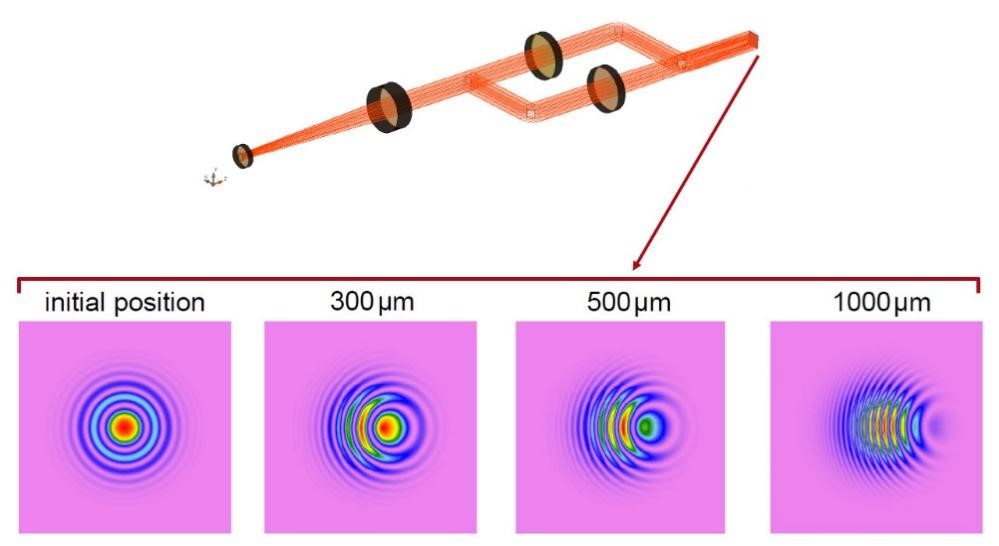
�����䪚���Եļ��g��VirtualLab Fusion�ڹ�Դ��Ԫ����̽�y���Ľ�ģ������Пo�c���ȵ��`���ԡ�
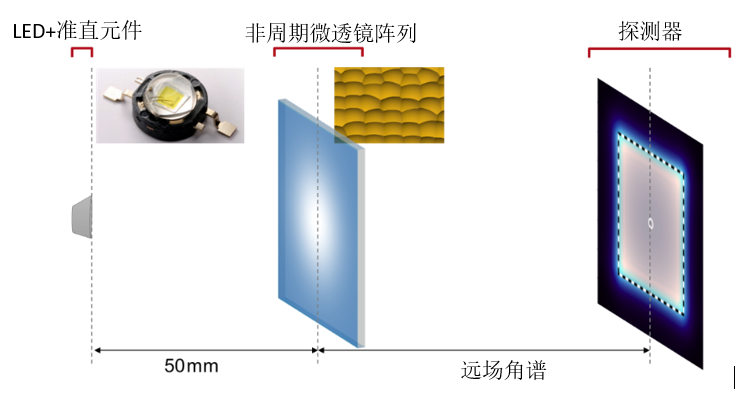
• ��Դ�Ľ�ģ�����������ڼ��⣬LEDs, LDs, VCSELs�����Դ��x�侀Դ�ͳ����}�_��
• Ԫ���Ľ�ģ�����������������R���������桢�������R��Pancake �R��GRIN�R�����R����š�DOEs�����w�����@�����R���w�S�����w���Uɢ�����R��к�SLMs��
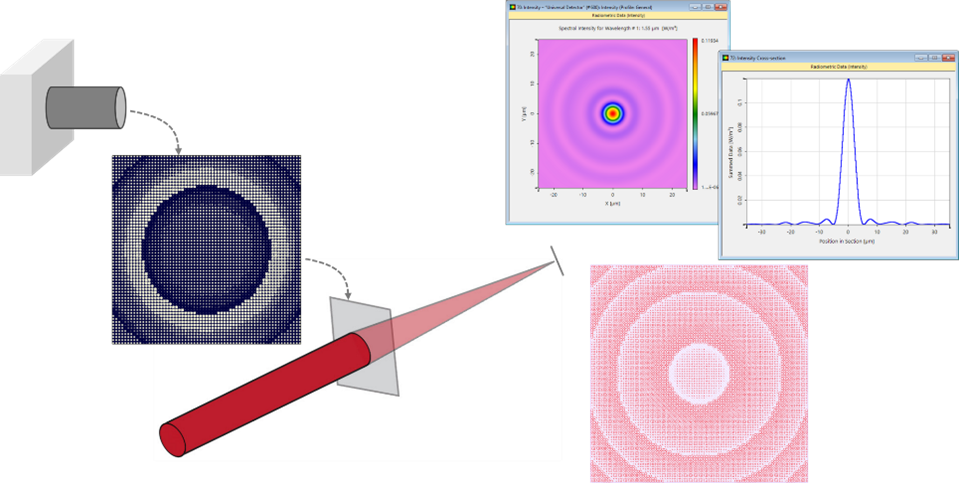
• ̽�y���Ľ�ģ��������������PSF/MTF������������ݗ�նȣ���Ȝy��������ɫ���ͳ����}�_�\�ࡣ
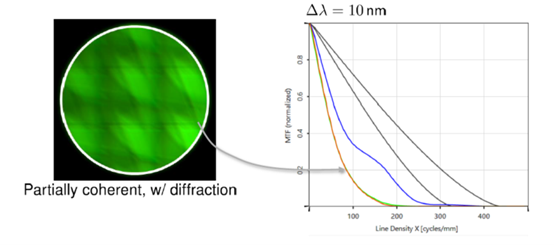
�ڲ���ARģ�͵�������ģ�M��ͫ�еĹ�ֲ��Լ��ɴˮa����MTF������Y��������Դ�ĕr�g����Է����Ͳ����Ȳ����������
VirtualLab Fusion��Ԫ����W����ƽ�_�ķֲ�ʽӋ��
��˷��漼�g
VirtualLab Fusion�����S�ཻ���Եķ��漼�g�Լ����@Щ���g朽�������ƽ�_���ڼ��g�x���ϣ����ṩ�˸��ʴ_�Լ������ٵ�ģ�M�Y����ͨ�^�Y�ϲ��л��㷨�c���Ӌ��C�������Mһ����߷����ٶȡ���VirtualLab Fusion�У�����������㷨֧�ֲ���̎�������������ڶ��Ӌ��C�����팢չʾVirtualLab Fusion�Ķ��Ӌ��������@����߷����ٶȡ�
�ռ�����ģ�M�΄�
��W��ģ���OӋ�΄�ͨ����Ҫ̎���S����������΄ա�ԭ���Ƕ��ģ�������������ӣ�
��ɫ��Դ�ͳ����}�_
��һ�M��ɫ����ʾ���@Щ��ɫ�����ͨ�^ϵ�y������ÿ����ɫ���Q��һ�������ķ����΄ա�
��ģ��Դ
�l������M��ģʽ�����磬��ģ��������LED�ȔUչԴ��ÿһ�Nģʽ���ɿ���һ�������ķ����΄ա�
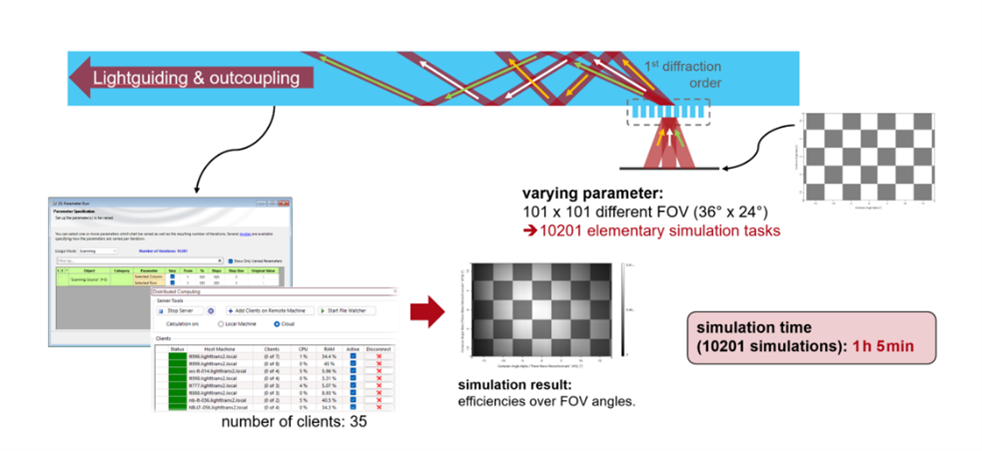
̎��ȫҕ��(FOV)
���磬���ڳ���ϵ�y��AR���R���Y����ÿ��ҕ���Ļ��������΄յįB�ӡ�
����ϵ�y����
���磬�Ƅ�̽�y��λ���Է������c�^��ÿ�����������ö���һ�������ķ����΄ա�
����
������N���ÏĶ��о���Wϵ�y������׃�����`���ȡ�ÿ��ϵ�y�����ÿɿ���һ�������ķ����΄ա�
����
ʹ�ìF�����g�M�Ѓ��������M���㷨��ÿ���������E����Ҫ�S������ķ����΄ա�
��Ό��F����Ӌ�㣿
��ÿ������������ĽM���У�����һ�M�����ķ����΄���Ҫ̎�����ֲ�ʽӋ�����S�����ϵ�ģ�M�M�в���̎����������һ����һ���؈���ģ�M�������F�ķ����ٶ��c����Ӌ��C�W�j�Ĵ�С�����ȡ�
�����cVirtualLab Fusion�M�зֲ�ʽӋ��W�j�O�õČ�Ԓ��
VirtualLab Fusion��Ԫ����W����ƽ�_�đ����I��
VirtualLab Fusion�܉F��Ԫ����W�Ľ�ģ�ͷ��棬�яV���đ����ڸ�У���о����Լ���֪����W��I������Ҫ�����I�����£�
1. ��������
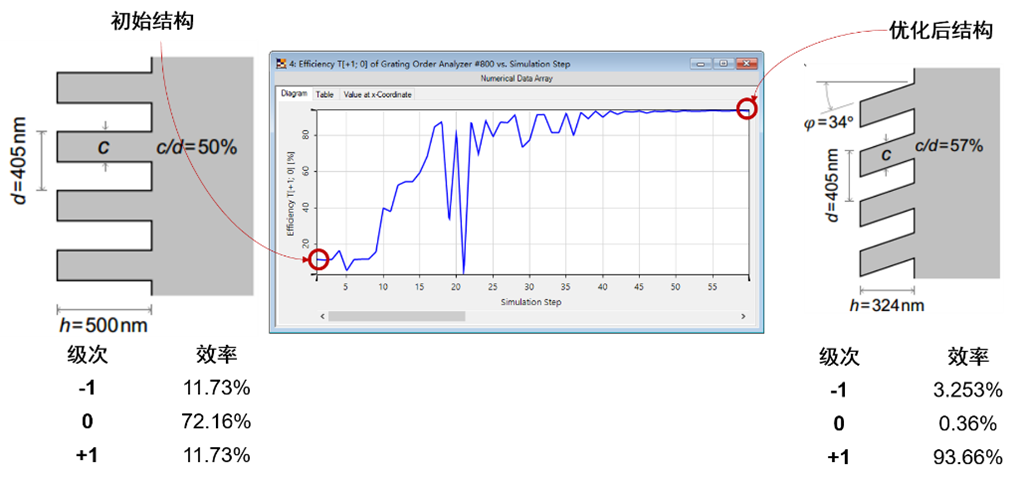
VirtualLab Fusion�܉�ʹ���������棬��������������c�D�����������Uɢ���ͳ�Ҏ�����WԪ�������������������R��У����F�������Ρ�
1) �����������
2) �����������
3) �UɢƬ
4) �R��к��Y����Ԫ���
�����W�������������OӋ
2. ��W�y��ϵ�y
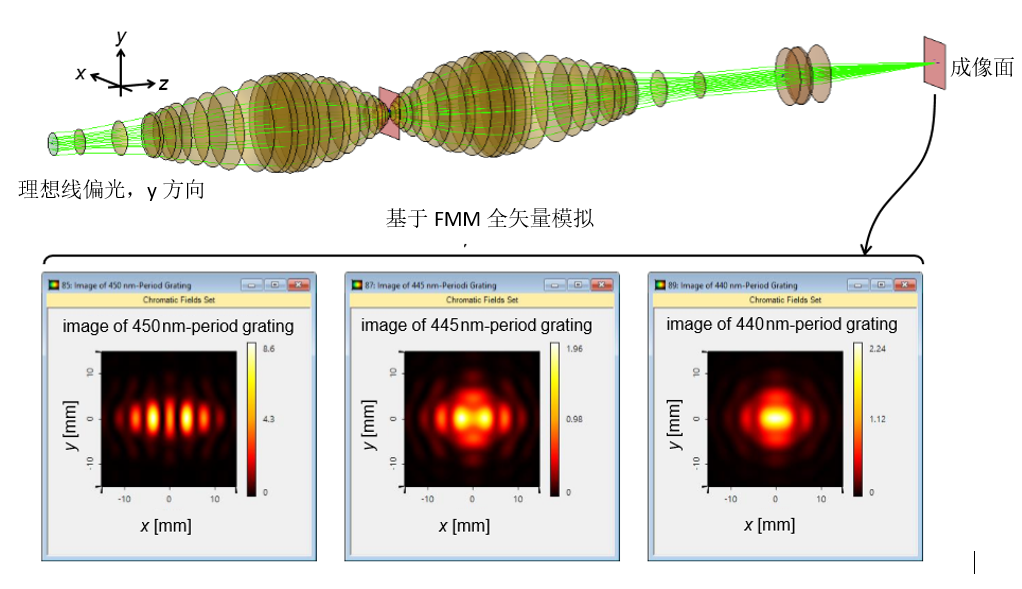
ͨ�^����������W��������x�����V�x�͂��yʽ��Y������ʽ�@�R�ij����|���c�ֱ��������M��ȫ����о���
1) ����x
2) �@�R
3) ��ɫ�x
4) ���V�x
����ϵ�y�⾀�Eʾ��D�Լ�����D��չʾ
3. �{���ӌW
VirtualLab Fusion �м����˸����~ģ�B�������Ԍ������ԵĽY������������Y���Ĺ���M�о��_��ģ�M���@�������Ľ��������伉���Լ�����Ч����ͬ�r�܉���M�Ѓ������ԫ@������Ҫ��ŽY�����������ɵ�������Wϵ�y���M�з�����Ҳ���Ԍ��������ԵĽY���������{С�w���M�о��_��ģ�M��
1) 1D��2D���|���
2) 1D��2D������
3) ���伉��Ӌ�㡢ƫ������Լ��Ȳ���Ӌ��
4) �{�A��
5) ����
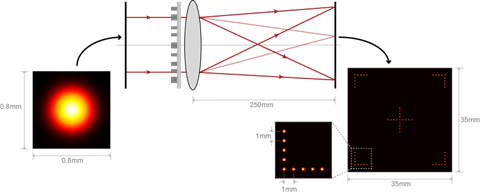
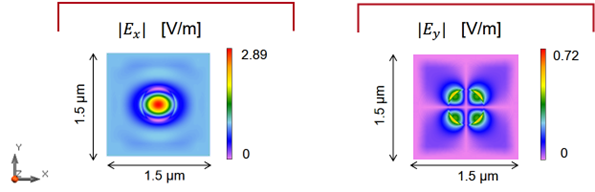
�Aб��ŵă���
ƽ�沨�����{�AƬ�r���AƬ�������ֲ�
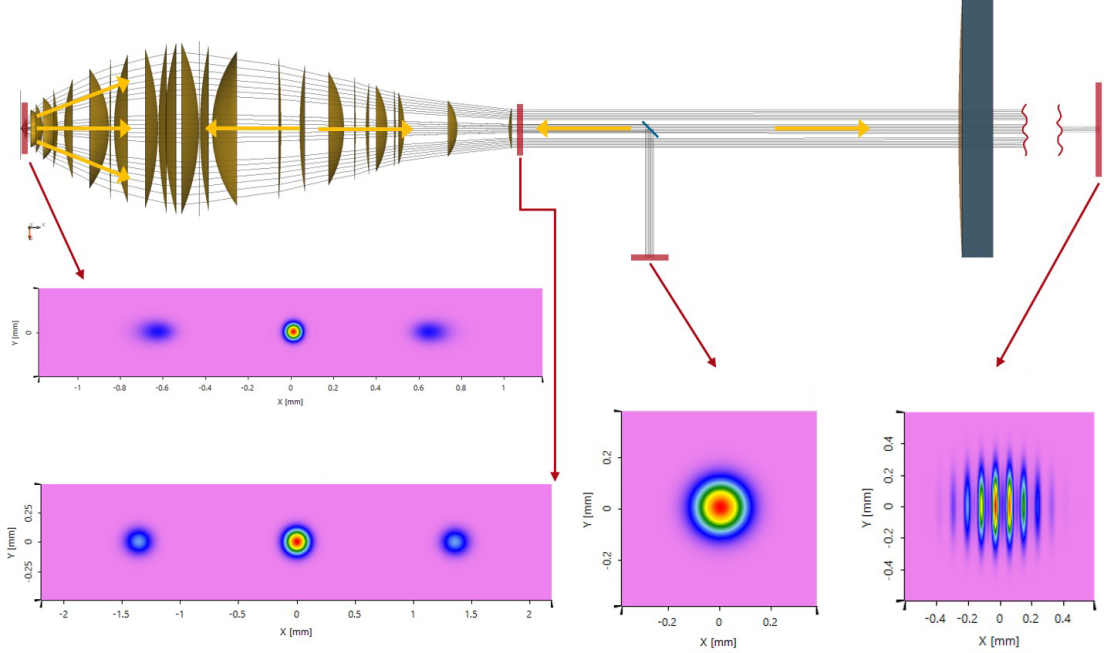
4. ��W����ϵ�y
ͨ�^����������W�����F�Rϵ�y��ģ���ṩ����������Ͳ�������Ե�ϵ�y�Ŀɿ���PSF / MTF�u����ϵ�y�п�������ţ�ȫϢ��WԪ���Լ������R��
1) �����R
2) ��PSF/MTF
3) ����
4) ������ŵij���ϵ�y
���ڸ�NA���R���Y�����A�M�г���z�y
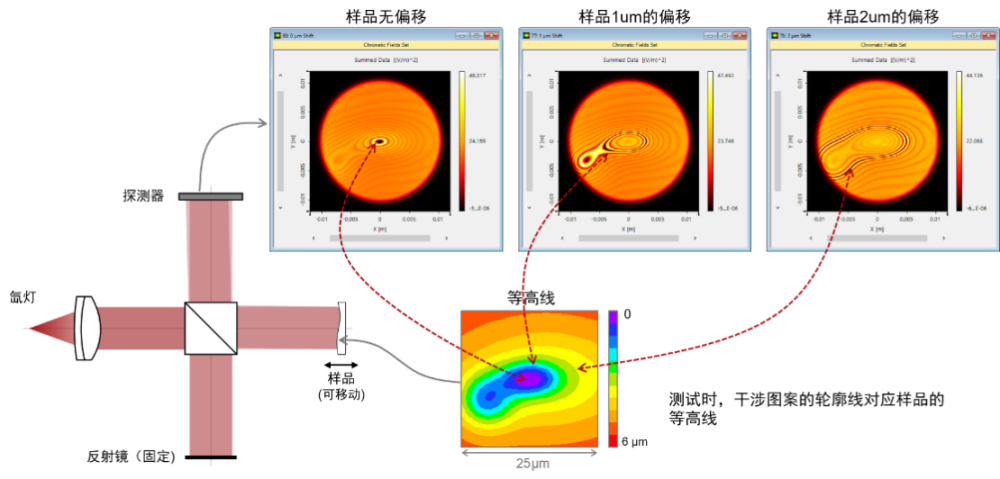
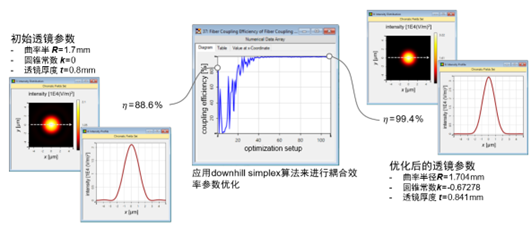
5. ��������/����ϵ�y
����������W������Ч�،��F�������Դ�����䡢���桢ƫ��Ľ�ģ�����ҿ���ʹ��������dȤ�Ĺ���������
1) �����ݔ
2) ����ϵ�y
3) �w���}�_
4) ���⾧�w
�������ϵ�y�Ľ�ģ�ͷ���
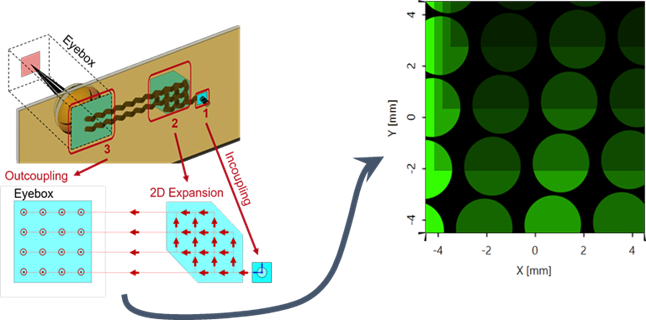
6. ̓�M�ͻ�ϬF��
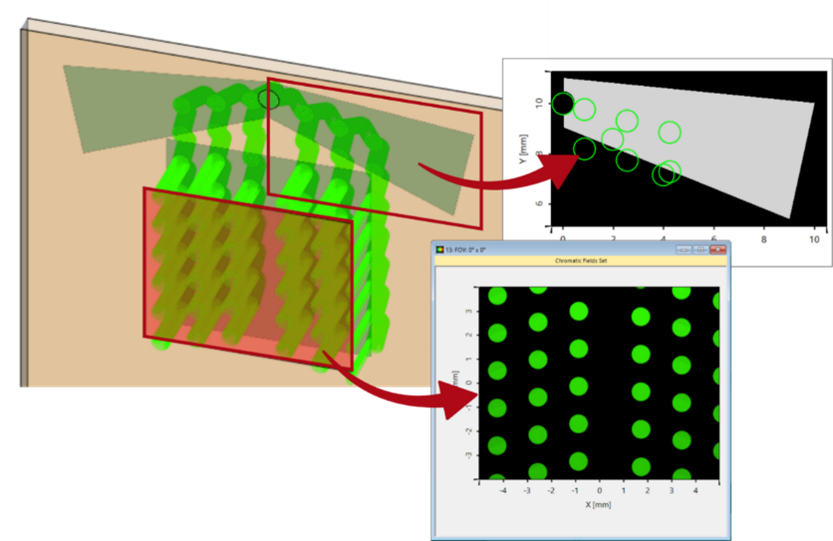
ᘌ�AR,VR�Լ�MR���ã�VirtualLab Fusion���Ñ��ṩ�˶�ͨ����������ϵ�y�ķ����н�ģ���g����ģ�^�����܉�ǰ������Լ�PSF/MTF�M���u����
����“����ʽ��ͫ�Uչ”�Ĺ⌧ϵ�y
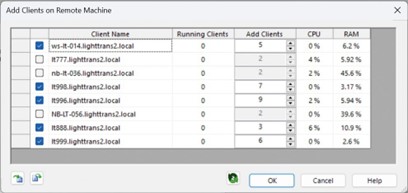
7. �ֲ�ʽӋ��
�ڛ]�зֲ�ʽӋ��r�����ɻ��������΄����څ����\������ɵġ��ڷֲ�ʽӋ���У�����Ҫ���Ĺ������̡�����ͨ�^��Ԓ���úͿ���Ӌ��C�W�j���F�@�����ܡ��F���VirtualLab Fusion���÷���õľW�j̎�������ķ����΄ա�������֮:VirtualLab Fusion���Ñ�ֻ����c�������ˣ��������ܵ��ֲ�ʽӋ��ď����ܡ�
ʹ�÷ֲ�ʽӋ���M��AR�Ⲩ���Ĝyԇ�������
VirtualLab Fusion��Ԫ����W����ƽ�_���ֵ��͑���ʾ��
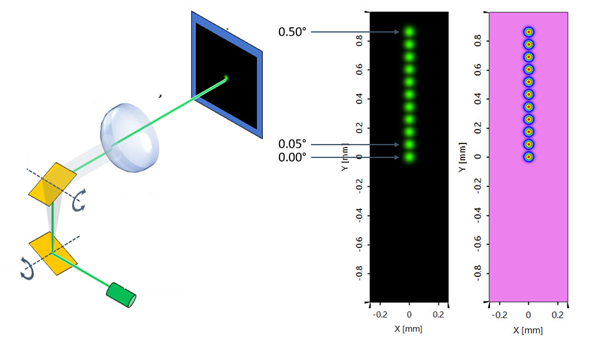
1. ���ڸ��N����x�Ĝy��ϵ�y����ͷ���
2. ������ŵď��s��Wϵ�y����ͷ���
3. ���w���ϵ�y���OӋ�̓���
4. ���ڱ����ŵĹⲨ���Y��ģ�M�c�OӋ
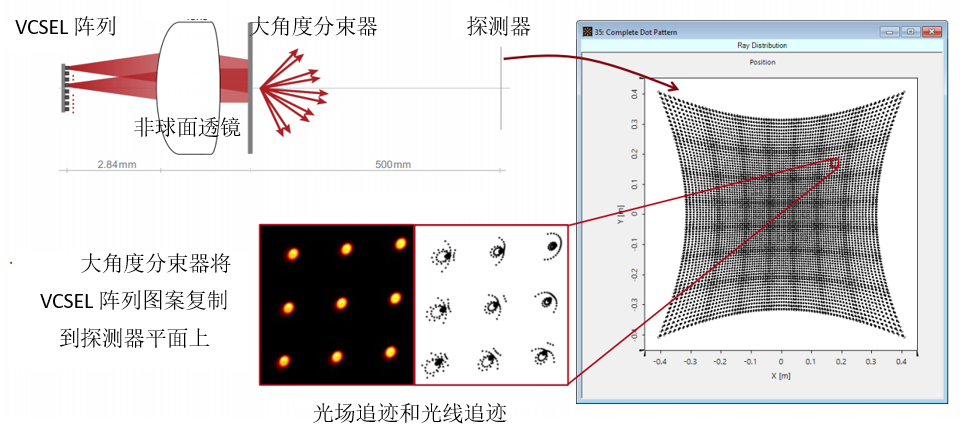
5. ����VCSEL��е��c�ͶӰ�x����Ę�R�eϵ�y
6. ������Y�����OӋ�̓���
7. ���R�OӋ�ͷ���
8. ���������R�������
9. �����R���OӋ�ͷ���
10. ��ƽ�_�Ϸ����c����
Ӌ��C����
1. ����ϵ�y��Windowsϵ�y��Win10������
2. CPU�����]Intel I7�����ϣ����lԽ�ߣ�Ӌ���ٶ�Խ�죬֧�ֶ��Ӌ��
3. �ȴ棺���]32G������
4. �ӿڣ�USB�ӿ�
5. �@�����m���@��
|