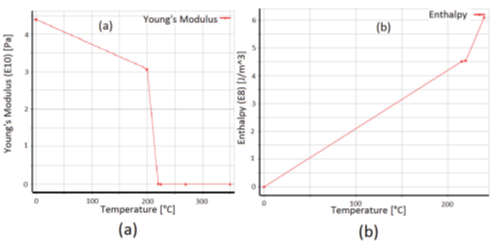
�D4��ʾ�� ����ه�ęCе�������ܡ��ڈD(a)�У�����ͬ�ԏ��ԣ�����ģ�����ڈD(b)�У��Ͻ���׃�ʡ�������ķ�x����˾(����)�Č�������ȡ�˺Ͻ����ه���ԡ�
���У�i,j=1,2,3�����A����B(0,ij)����o���������ʙE������∆Bij���������T�������a�������ʙE��׃���������Ա�ʾ��

��2��
���У�k,l=1,2,3������˹̹�����Ҏ�t���@���m�á����A����σkl�������T��ʸ����������πijkl������ÿ�����ϵĵ����A��늹�W����������ͨ�^����ʽ(1)��(2)����ijЩ����σkl�a���r���҂�����Ӌ�������ʙE����Bij��Ȼ������������Pϵʽ��Ӌ���늳�������ϵij
��3��
�õ��ĽY��ϵij���M�о��w�ĺ��m��W���档����ʽ(1)-(3)���κ�����ϵ�ж�������Ȼ������Ҫ���{������ÿ������ʽ�ď����r��Ҫ��ͬһ����ϵ��ʾ�����ھ��w���ϵČ��Q�ԣ��ھ��w����ϵ�оͺ������������������|�����磬��늹�W����πijklͨ��ֻ���@�ӵ�ϵ�y������Ŀ�нo��[6]����һ���棬�ڌ��������ϵ�У�ͨ�^���H�ľ��w�νY�����Ա����������σij�����˺��m�Ĺ�Wģ�M����Ҫ�o����늳���ϵij��������ģ��҂����ȶ��x�ɂ��ѿ�������ϵ�yx-y-z��x��-y��-z���քe���팍��Һ;��w����ϵ�y��[aij]����Č���ҵ����wϵ�y���D�Q��ꇡ���鑪��ͨ���ڌ����ϵ�y����x��y��z����������늏���ͨ�����ھ��w����ϵ����x��y��z���o��������ʹ�ù�ʽ(2)���@�ɂ����������ͬ������ϵ�б�ʾ�����˺��ף������A���������D�Q�����wϵ�y���������D�Q���A��늏��������ڌ��Q�ԣ�����Nye’�T��������ͨ���Կs���ķ�ʽ���_����σn��n=1��……��6������3×3����׃�Q��ꇣ��҂����Ȍ��s��σn���_��σij��Ȼ��ʹ������ķ���
(4)
��Ӌ���ھ��wϵ�y���P��x��y��z���đ�������������׃�Q����׃���Q�ԣ�����Nye’�T������������σijҲ���Կs����σ^����ͬ�ӣ����ھ��w�Č��Q�ԣ�ʹ��Nye���T��[6]������ʽ��2���еď������Կs�����҂������ھ��w����ϵ����x��y��z���Č�����ʽ��2��������
(5)
���У�m��n=1��……6�����H�ϣ���늹�W�����������Ծ��wϵ�y��6×6��ꇵĿs����ʽ�o������Ӌ�㷽��ʽ��5��֮��∆Bm^�����ԸČ���һ�������_����ʽ∆Bij^����
������ʹ�÷���ʽ��1��,��������Ӱ푵������ʙE�����Ӌ�����������������:1���ɵ�ʽ(5)�õ��ď���∆Bij^���ھ��wϵ�y�нo���� 2���o���������ʙE�����ھ��wϵ�y����һ�����εČ��Ǿ���ʽ���҂��ھ��wϵ�y���M�з���ʽ��1����Ӌ�㣬�õ�
(6)
����
(7)
......
 ��1��
��1��