ժҪ
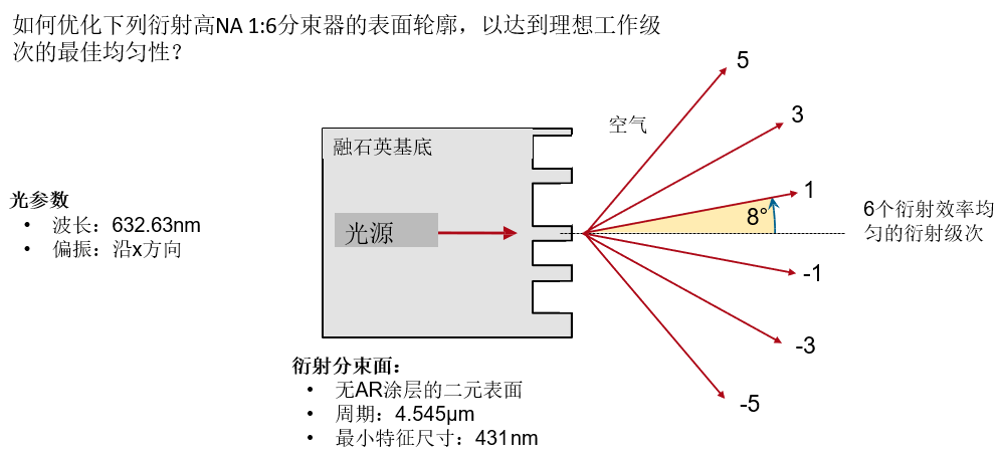
������λ�ͽY��֮�g��ֱ���Pϵ����������Rͨ������һ���İ��S���Ɓ��OӋ���@Щ�㷨Ҳ�ṩ���@�N���ƣ���֮��Ȼ���ڷǰ��S��������NA����������r�£��@Щ���ƌ�����һЩ���ʴ_�ԣ���ˣ�������M���~�����ĺ������ٽ��h�M�Ї���ķ��������@�������У�ʹ���攵���伉�����͵Ķ�Ԫ1:6�����������@�Ӈ�����u������ˣ�����ʼϵ�y�ĽY���M���˅���������ͨ�^�ɾ��̹�ŷ��������x��һ�M�Զ��x���u�r���������څ��������ͺ��m�Ĺ��������ʹ�Ç���ĸ����~ģ�B�� (FMM)��
��ģ�΄�
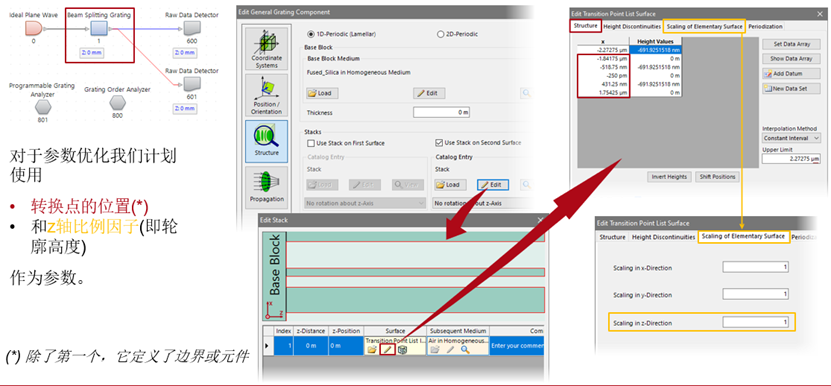
����������ʼ�OӋ(*)
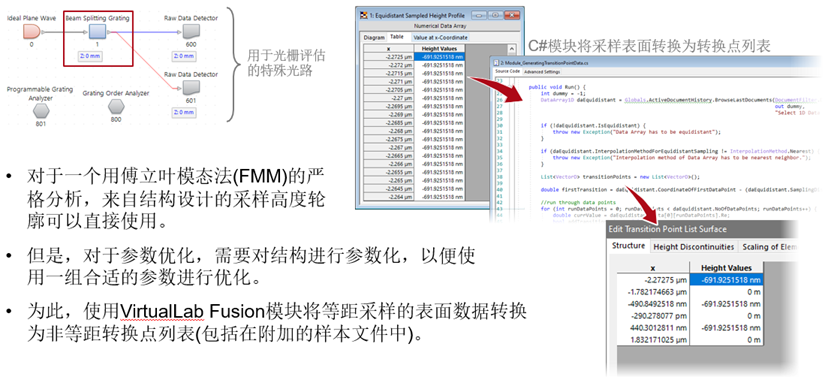
1. ����VirtualLab Fusion�ĵ��������~׃�Q�㷨(IFTA)�OӋ����Ӌ���˷������ij�ʼ��λ������
2. ���ڸ߶�݆�����D�Q�������˻��ڱ�Ԫ������(TEA)�ĽY���OӋ��
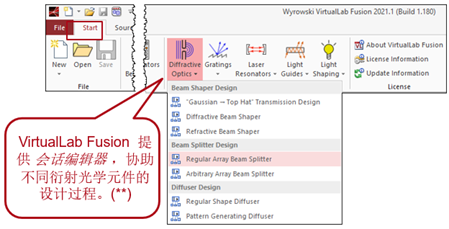
(*)�����@��������һ���� (**)�@Щ��Ԓ�����������W�������y���п��á�
TEA�͵Ⱦ��ӽY���ľ�����
TEA�dz��m������С�����ߴ粻С�ڼs5�����L����r����������@�ӣ����/��λ�ֲ��c�OӋ�߶�݆������ú���ܕ��@ʾ���c����ֵ�����Pƫ�
��ˣ���Ҫ�M�Ї�����u����
���څ�����������Ҫ���Y�������M�в�ͬ�Ķ��x��
���Ĕ����ʂ�(������)
��������������Mһ������
�Ă����伉������Щ�u�r������
���ÿɾ��̹�ŷ�����
��������ʼ�OӋ�ć������
�O��������
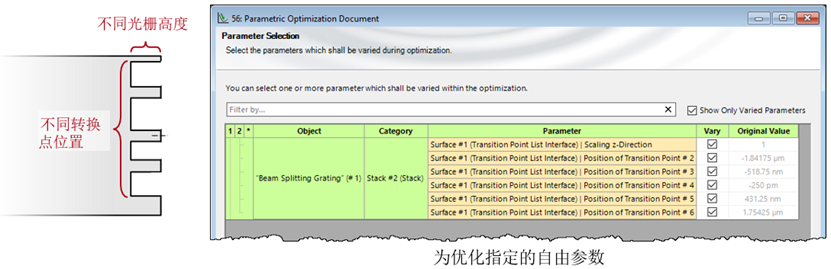
�ɂ������^�̌���
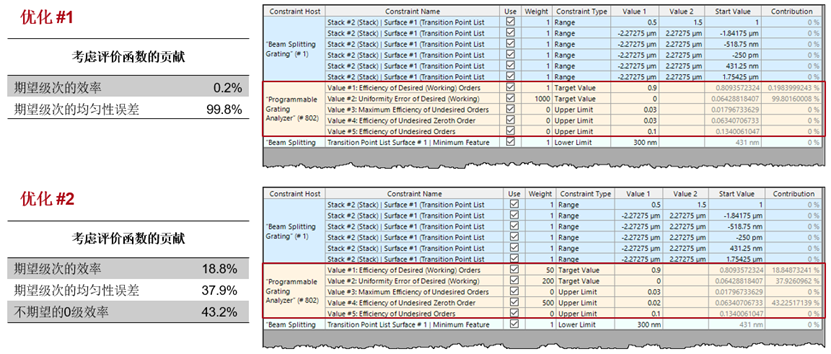
���@�������У��҂���ʾ�˃ɷN���в�ͬ����Ŀ�˺ͼs���ă�����
�ڃ���#1�У����ȿ��]�������`�
�ڃ���#2�У�0��ҲҪ��С����
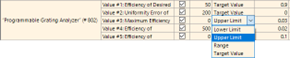
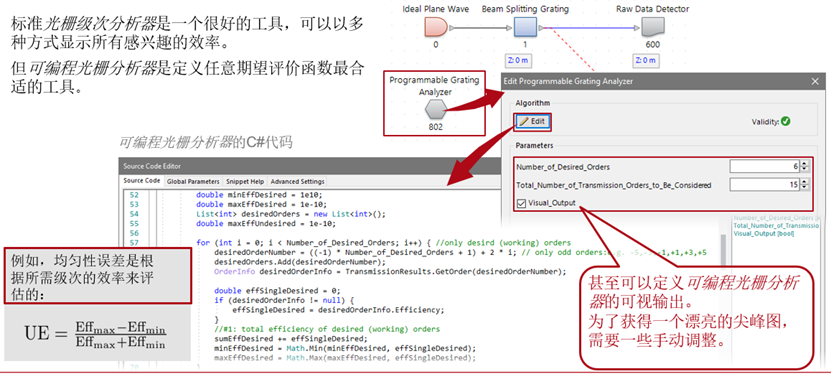
�P���u�r�����s�����Ñ�����ָ��
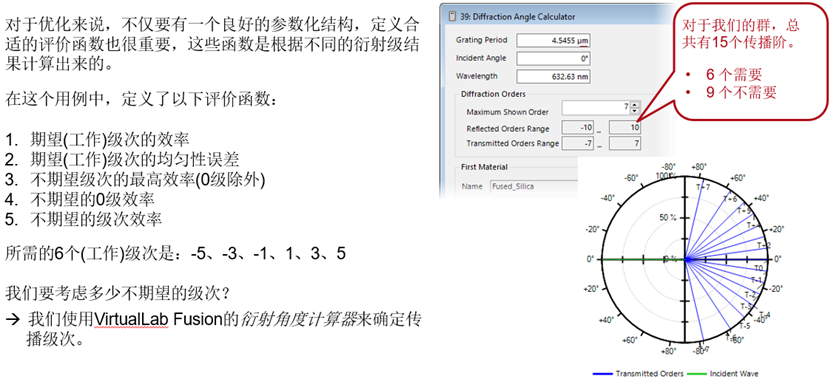
�Ϊ���Ŀ��ֵ������������������ʲô
�Լ�ͨ�^���أ�������ؕ�I��ԓ��ʲô��
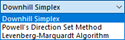
�ڃ����^���У������˃Ƚ����½��μ����㷨
�u�r�����s��������
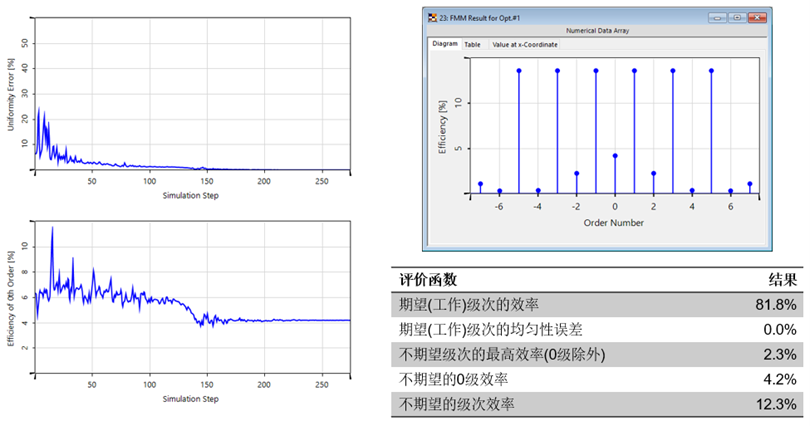
����#1(���ȼ�=�������`��)
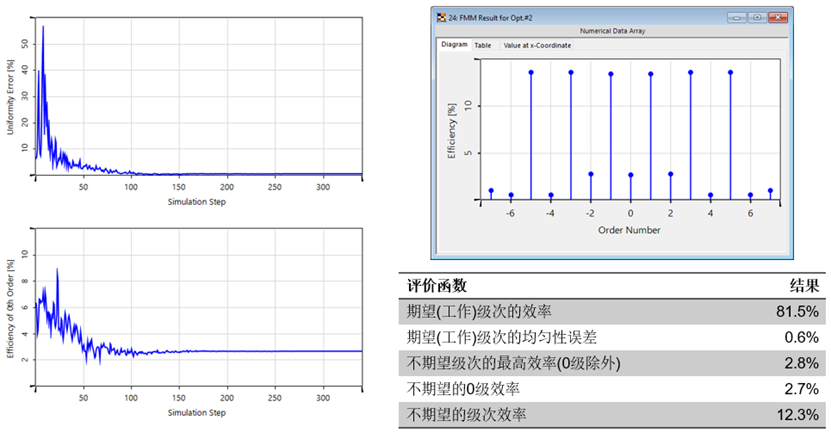
����#2(���ȼ�=�������`��&��0��)
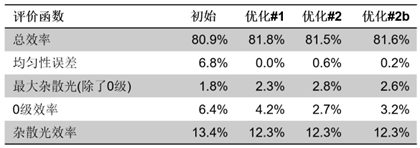
����Y������(��ʼ—����#1—����#2)
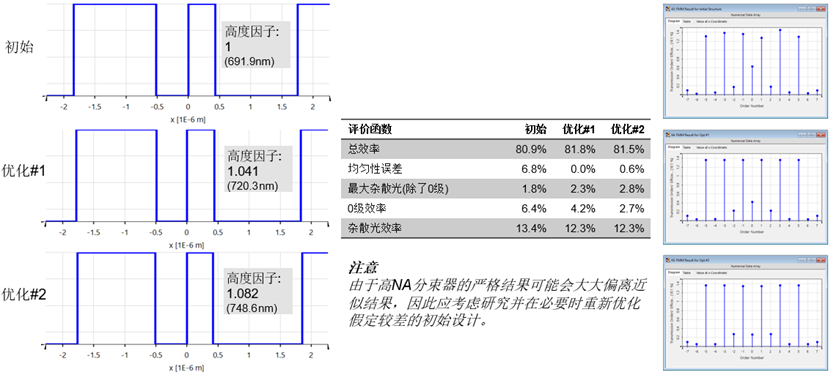
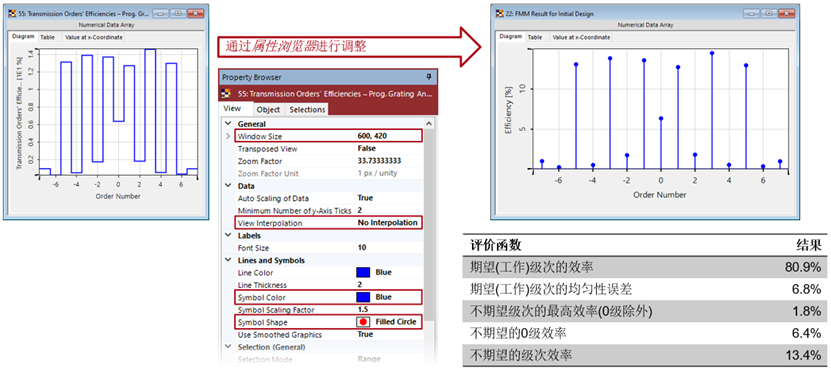
�������Y��
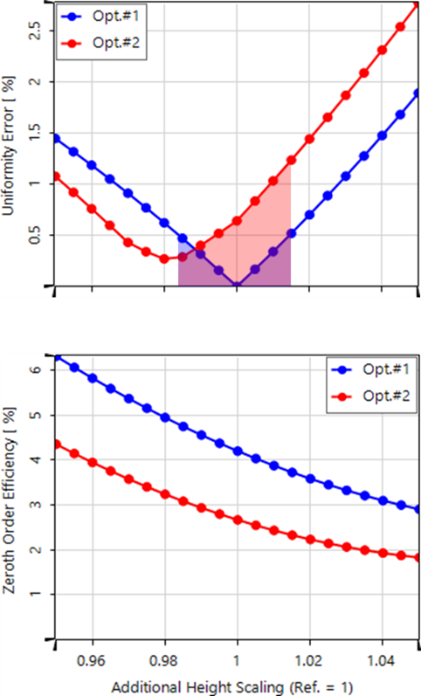
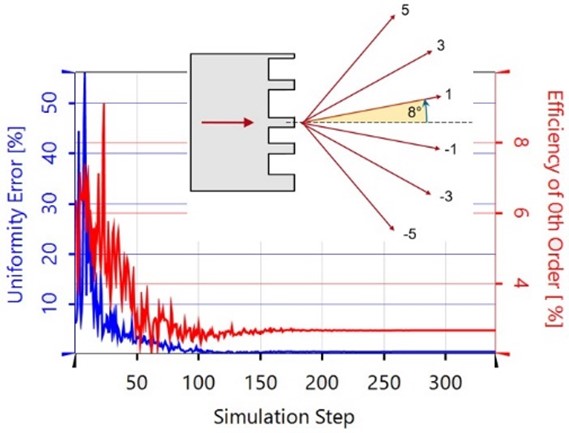
�о�����±5%���������a�^���п��ܵĸ߶ȹ���r�|�������ı��F��
�ڴֵĹ�����ȣ��g������`��s��±1.5%(�{ɫ&�tɫ�^���L��)���ڶ��N�����OӋ�ľ��������@�^�
էһ��������#2����С�������`��(�tɫ����@0%)�������У��@�ƺ���Щ��֡��@����郞��#2���ȿ��]�˵�0��Ч�ʣ��Ķ�������һЩ�����ԁ팍�F�@һĿ�ˡ�
��ˣ����ڹ�������������A�ڷ�������2�N�����ĽY��������һ�����@�^�͵�0�A��
ע�⣺
�������Y���еą���ֵ1����ָ���z�y�Y���ĸ��ԆΪ������߶�(����ɫ����ʾ)��
�������YՓ
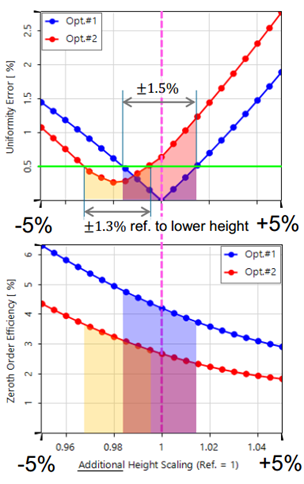
����yԇ�ṩ��һ�����õ���Ϣ���A���ԛQ��ʲô�����m�����葪�õĽY����
���Կ��������ʹ�þ�����`����͵ĸ߶ȣ������Ƶ�±1.3%(�Sɫ�^���L��)�Ĺ�����ȣ���2�����ĽY��������`�����0.5%(�G��)��
��ˣ����� 0.9825 (707.7 nm) �~��߶ȿs�ŵĵڶ������Y��������һ���������w���ܺ��m�����ý�Q���������±������һ��“����#2b”���@ʾ�������ĽY����
�ļ���Ϣ
������x
- �ɾ��̹�ŷ�����
- �ǽ��S������������OӋ�c�������
- �a�����S��˵�������������OӋ
|