ժҪ
�ڞ������ͻ�ϬF����AR&MR�������OӋ�Ⲩ���O����^���У����ṩ��ҕ����FOV���ȅ�������Ҫ���dȤ���ڡ�����ͻ�ƿɌ��F�����ҕ���ĘO�ޣ��˂��о��˸��N�����������ڏ�������ϵ�������ϵĂ����^���зָ�ҕ����ϵ�y��һ���dz����еķ��������^�� "������ͫ�Uչ"������FOV����ؓ����ʹ�Ãɂ�������EPE��Ņ^���@Ҳ��������ܛ��Hololens2�����@���ļ��У��҂�չʾ����VirtualLab Fusion�Ќ��F�@��һ��EPE���������ܛ��US9791703B1������
��ģ�΄գ����ڌ���US9791703B1�ķ���
�΄�����
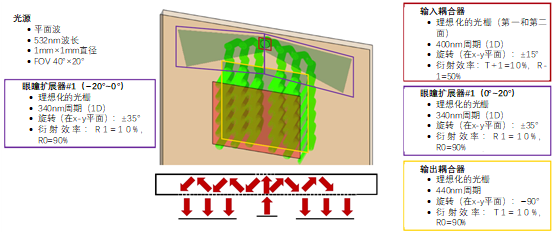
�⌧Ԫ��
���˹⌧�M�������Ժ����ض��x���Џ��s�Π�ą^���ϵ�y�����⣬�@Щ�^�����������뻯�Ļ��挍�Ĺ�ŽY�����������������������͔Uͫ���l�]���á�
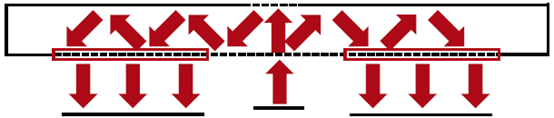
ݔ����Ϻ�ݔ����ϵĹ�Ņ^��

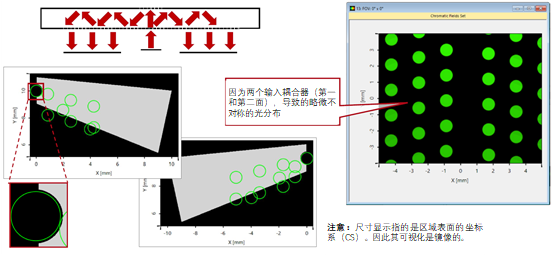
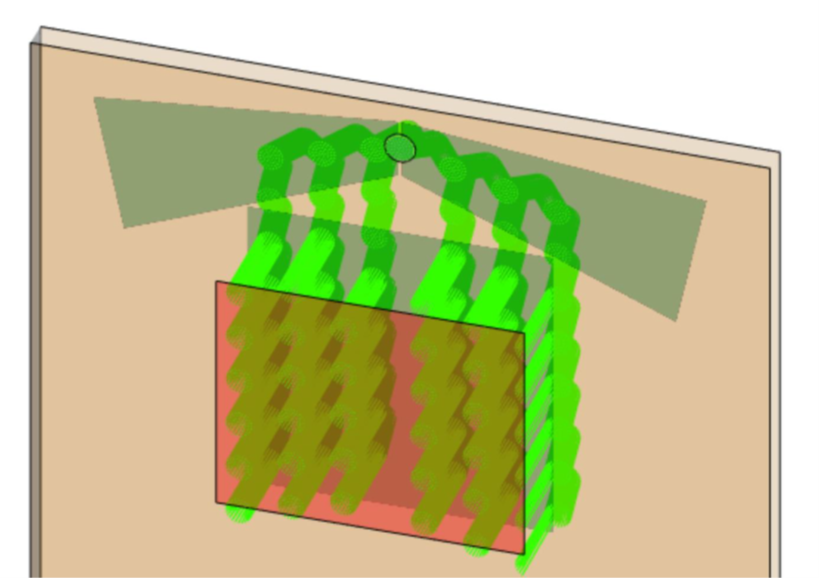
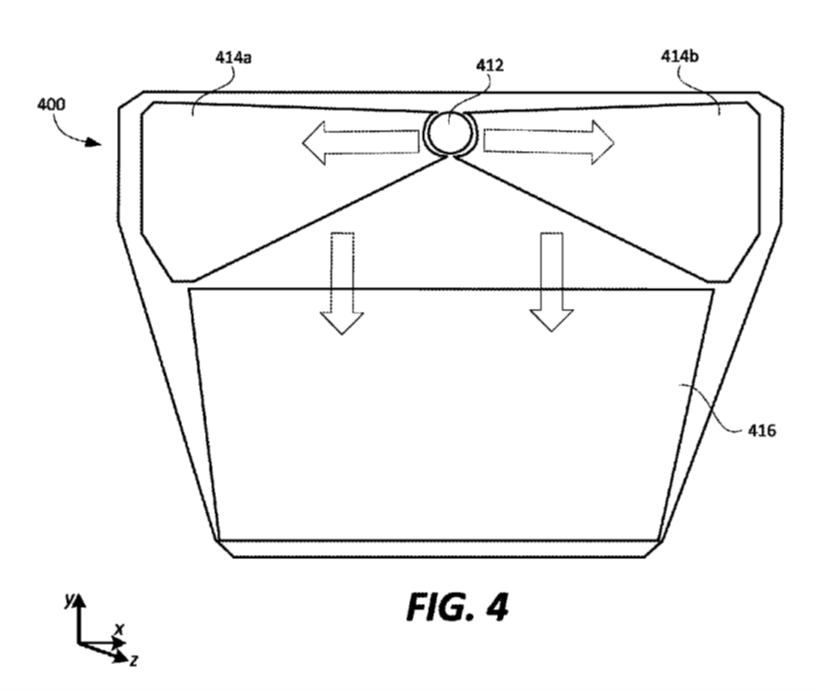
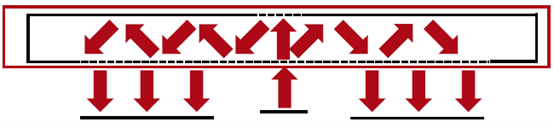
���˺�����Ҋ���҂��ڈA�΅^��ʹ���˃ɂ�һ�S������������Ϲ�ţ�һ���ڵ�һ���棬һ���ڵڶ����棩���@������FOV�����Ҳ��ֵ��О��������Q��������ͨ�^���ɂ���ŽM�ϳ�һ����һ�Ķ��S���ڽY����λ�ڵ�һ��ڶ����棩���˷��@�����}��
�������½M�Ϻ���Ϲ⾀��һ��һ�S�����Եij�������������ã���һ�����εą^���@��һ����������ã�����ʹ�OӋ�и�����`���ԣ�������һ�����S���ڵij������������������
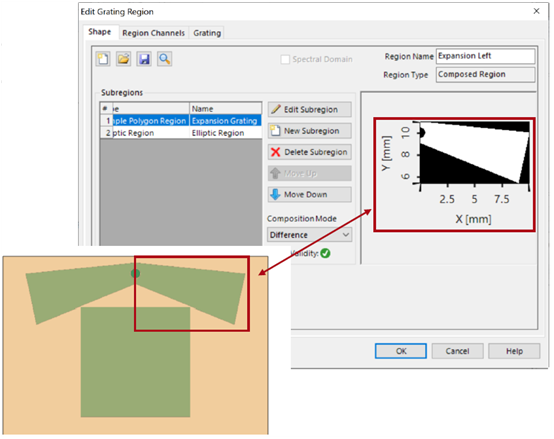
��ͫ�Uչ����EPE���^��
ÿ���^����Π����ʹ�ò�ͬ�ķ����Ͷ��x���ԁ��dz��`��ض��x�����@�������У��ɂ�EPE�����ɶ�߅�΅^���c�ɂ��E�A�w�Y���������x�ģ����и�Ȳ����֡��@Щ�����һ�S�����Եģ����D�ǶȞ�±35°���քe����Ⱥ��҂ȣ��������P�څ^���x����Ϣ�����棺
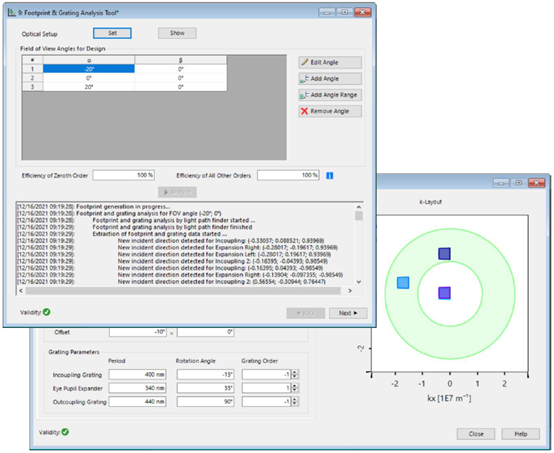
�OӋ&��������
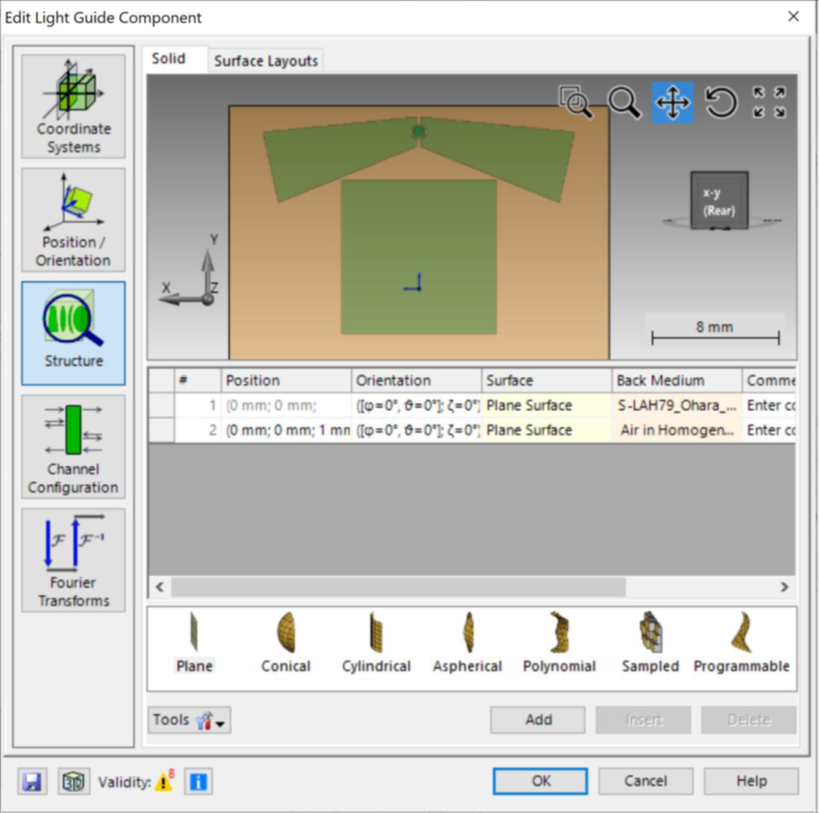
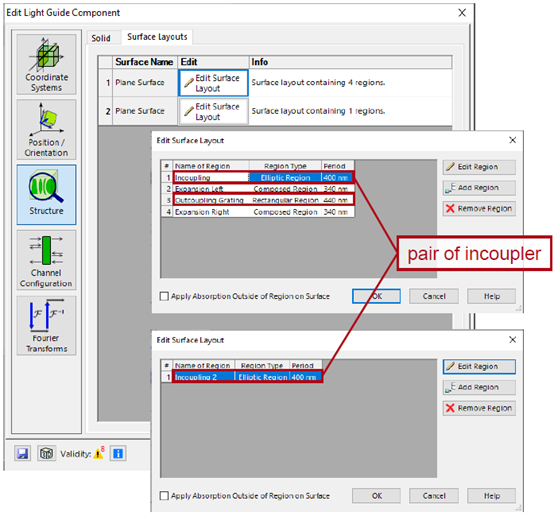
VirtualLab Fusion�ṩ��һϵ�еĹ��߁���� ��W���̎��OӋ�ͷ����⌧ϵ�y���΄ա������⌧ϵ�y���΄գ�������
- �⌧�����OӋ���ߣ�
�OӋһ������1D-1D��ͫ�Uչ�Ĺ⌧��������������ϵ�y�Ļ��A��
- k�ֹ��ߡ�
��������OӋ����ϗl����
- �ߴ��ŷ������ߡ�
�z�y����ϵ�y�е����E���Դ_�� ��ą^��Ĵ�С���Π
���Y-Ԫ��
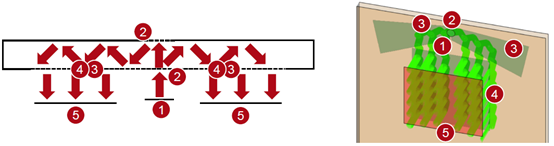
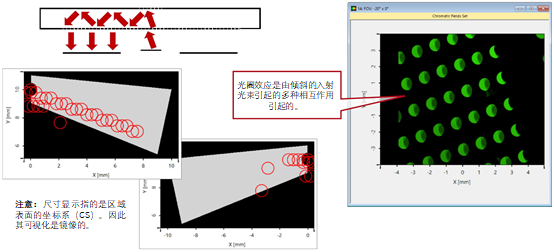
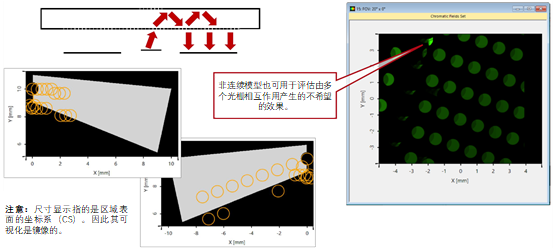
�Y����ϵ�y�еĹ⾀
ֻ�й⾀���䵽 "�ۺ�"���z��C̽�y�����ϣ�
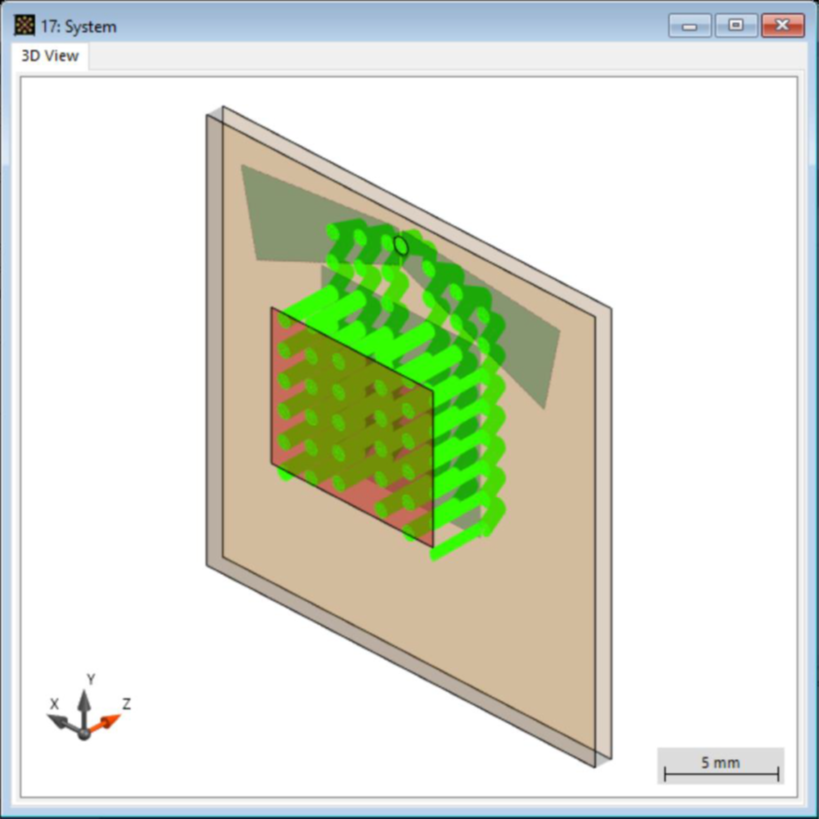
�����ڹ⌧�Ȃ����Ĺ⾀��
FOV��0°×0°
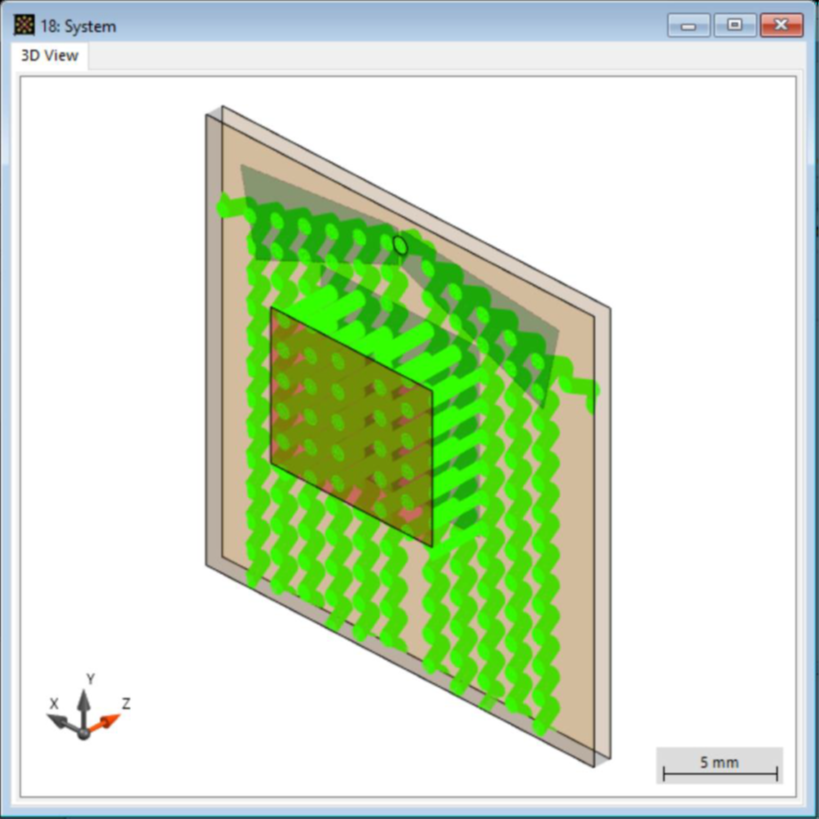
FOV��−20°×0°
FOV��20°×0°
VirtualLab Fusion���g
|