ժҪ
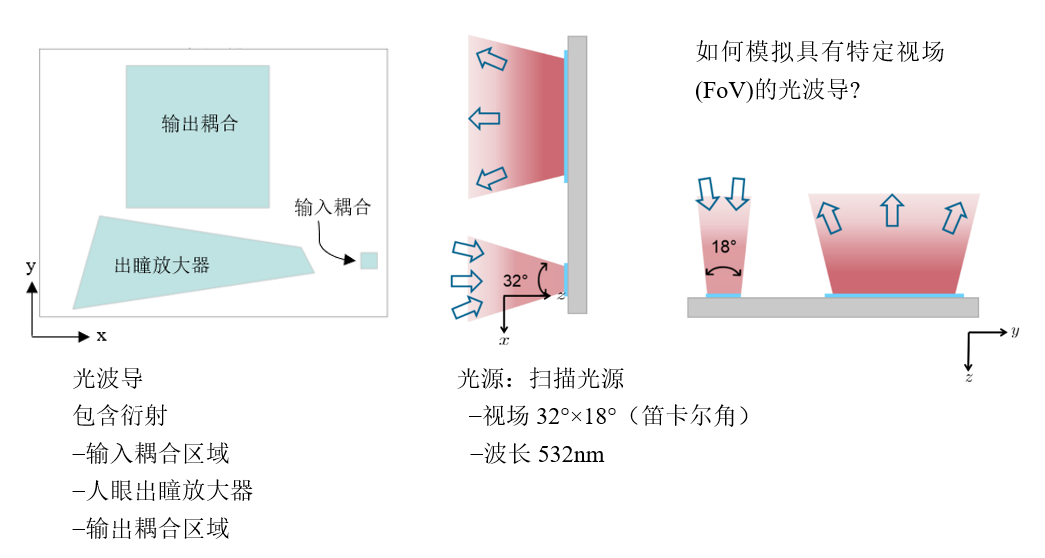
Ŀǰ����������µ������ͻ�ϬF���O�䶼�ǻ��ڹⲨ�������ã����Y���^�Y������Ϲ���M���ݔ����VirtualLab Fusion���g�܉�ͨ�^�����҂����ص�������W�������@Щ�����M��Ԕ���Ľ�ģ�����а������и��dȤ��Ӱ����أ�������ԡ�ƫ������䣩���҂�ͨ�^����һ�����ε�“HoloLens 1”�ͣ�1D-1D��ͫ�Ŵ���������ģ�́���ʾ�@�N������ԓ�O���܉���32°×18°��ҕ�����������ݔ��
��ģ�΄�
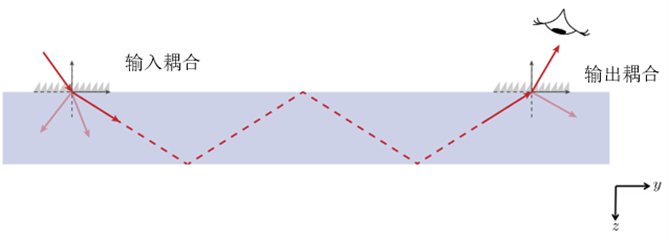
�Ⲩ���Ĺ���ԭ��
�Ⲩ��ʹ�ÃȲ�ȫ����(TIR)��“���@”�Ⲩ����ȵĹ⡣��ˣ����ù���������ͳ���⣬���_���M��Ȳ�ȫ����l����
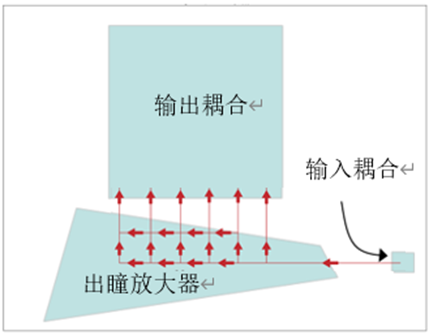
��ͫ�Ŵ��ŵĹ�������ijһ��������(�@����x����)������ϵĹ�ͫ���ԔUɢ��ͫ�����ߓQ��Ԓ�f���������^��^��
���@�N��͵��O���У�ݔ����Ϲ�Ų��Hؓ؟����ݔ����ϵ��^���ߣ�����߀ؓ؟��ͫ�ڵڶ�������(�@����y����)�ĔUɢ��
�@�N���xʽ�Ĺ�ͫ�Uɢ��“HoloLens 1”�Ͳ��ֵ�������
�����OӋ����
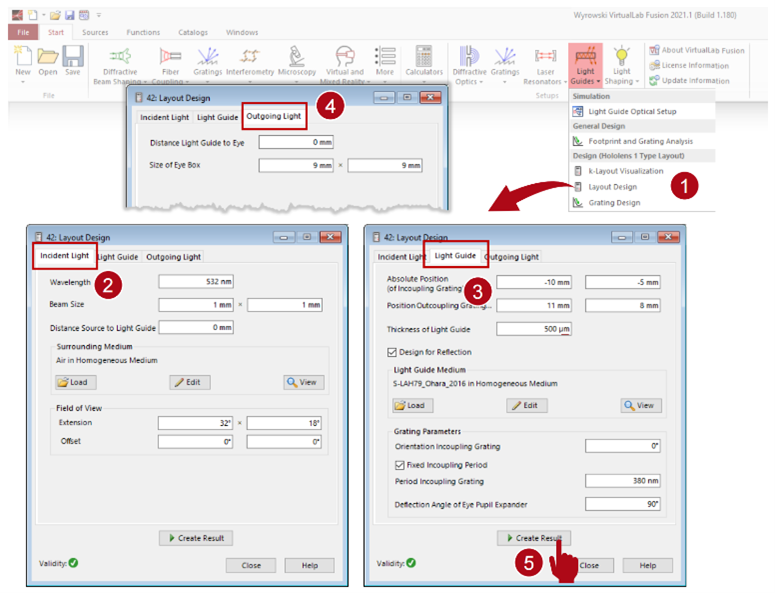
�����O���@�N�Ⲩ���ęM�֣�����ʹ��VirtualLab��Layout Design���ߣ��H�ڹⲨ���������п��ã���
��ʹ�ð����ą���������Ĭ�J���á�
ԓ���߸����o����Ҏ��������������^��^���ṩ��һ���Ⲩ���Ĺ�W�����O�á��eע����ǣ���Ņ^��ęM��λ�ú������Լ�������ڶ����Ԅ��O�õġ�
���x�����Γ�“�����Y��”���o��Ȼ�����������W�����O�ú�������k���ֈD��
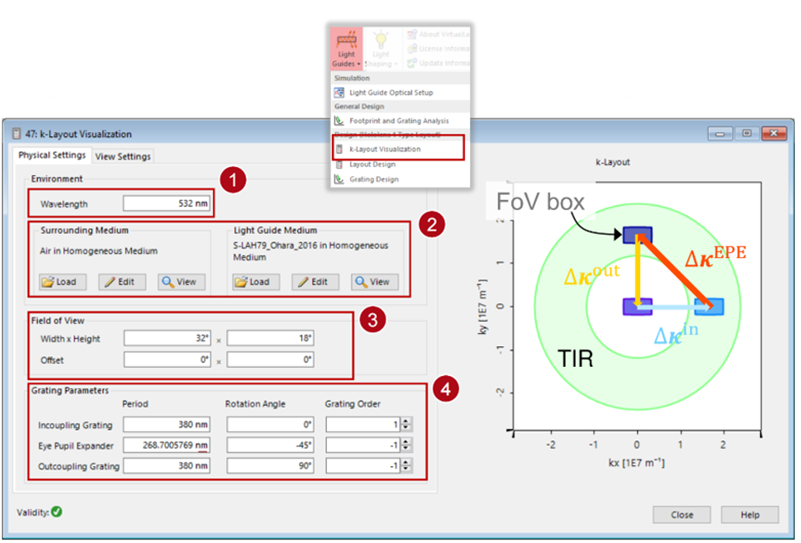
�鿴k����
k���ֈD�����c�Ⲩ��ϵ�yһ�����鲼���OӋ���ߵĸ��aƷ������Ҳ����ͨ�^�ˆ��еėlĿ�������ɡ�
�����������
�����
���L��
�h����ƽ��IJ��ϣ�
ҕ���Ƿ�����
������ںͷ���
�Y���D����������Ϣ(��k����)��
�������σȲ������l���ĈA(���÷����kֵ)��
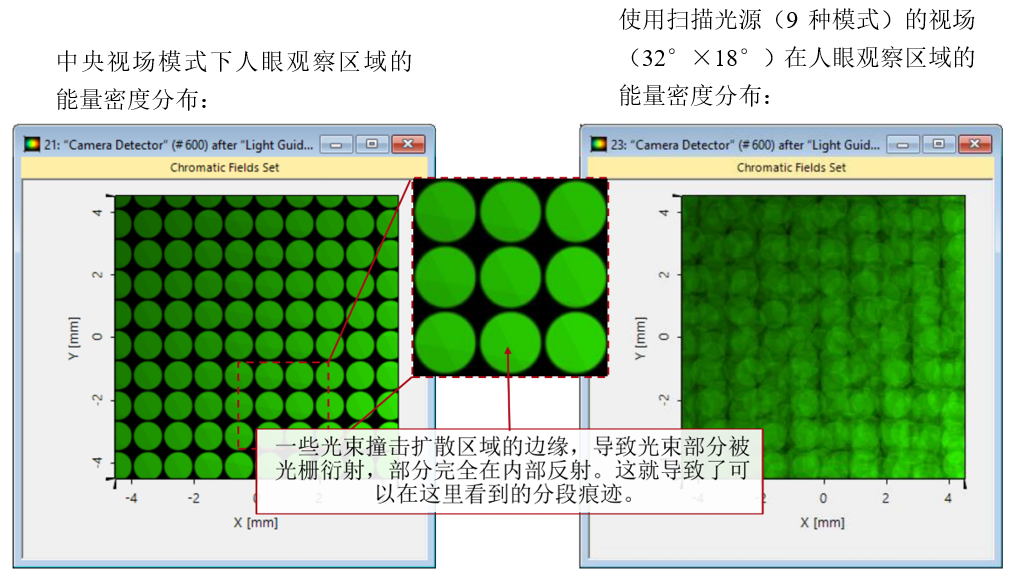
��ijЩ��Ņ^���������������ҕ�����졢�Π��λ�á�
�ɹ�������ҕ��λ�Ƶ��f����
�κ΅������{�����������ظ�׃�D��
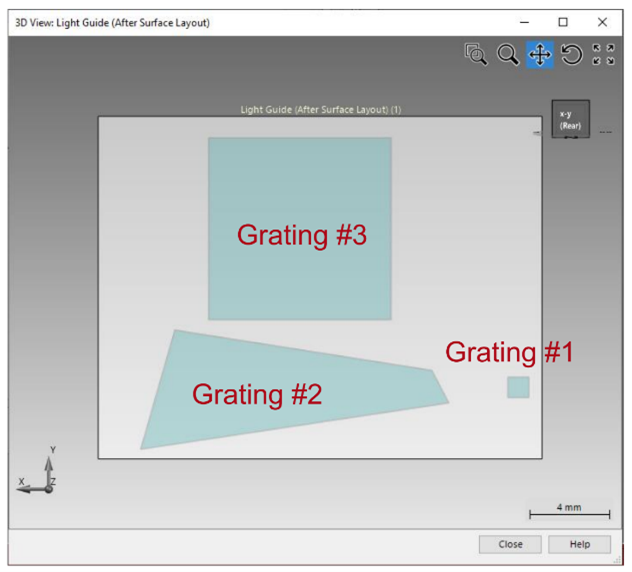
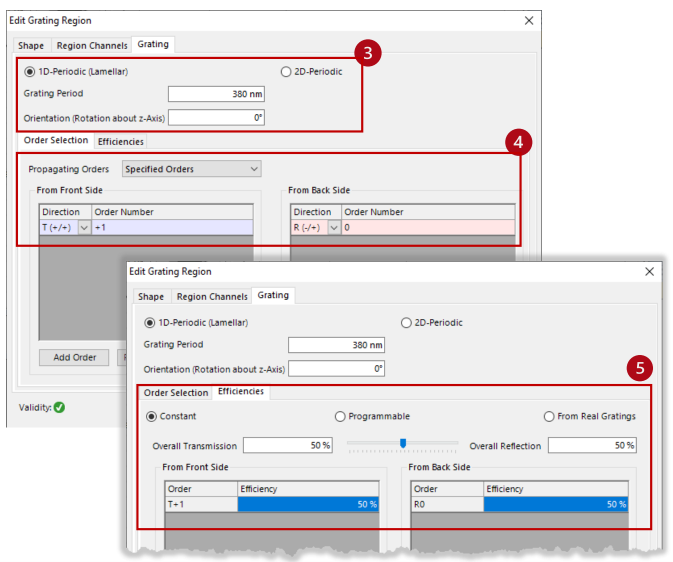
�Ⲩ�����沼��
�β����@ʾ�˵�һƽ������ϵ�3����ţ�
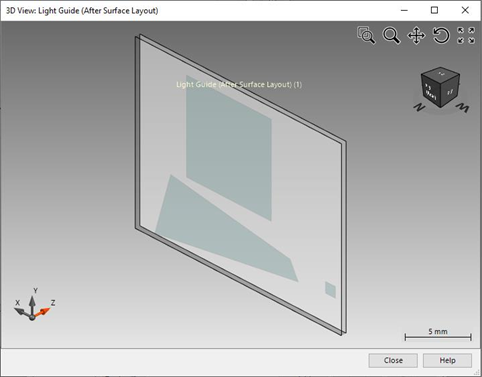
���#1��������
���#2���Uɢ���
���#3��������
���#1��ݔ����
�����ű����x��һ�����΅^��ȡ����x��Ņ^���һ�㹤�������ǣ�
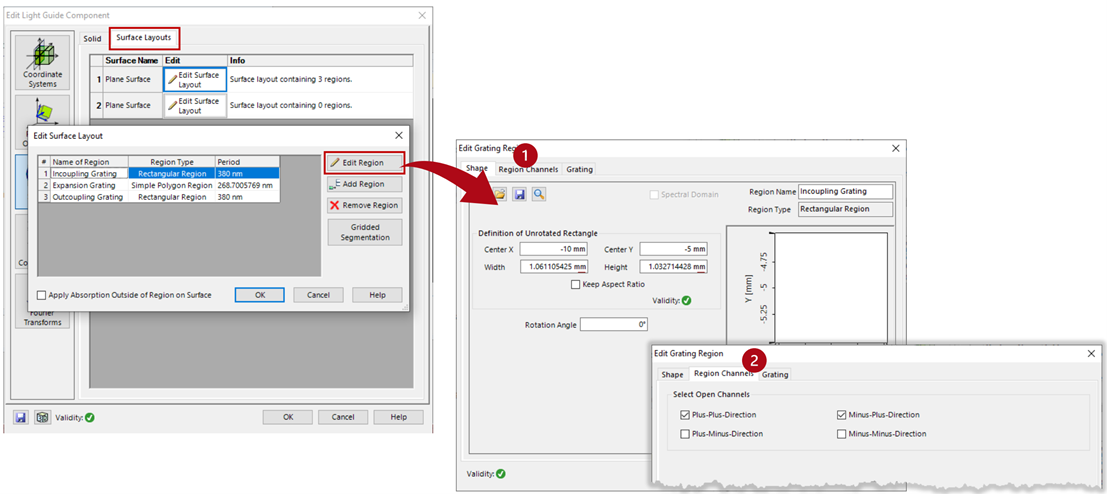
1. �_���^����Π��ֱ����
2. �x��^��ͨ����
3. ���x��ŵ����ںͷ���
4.ָ���������Σ�������ͱ��棩��
5.ָ����Ч�ʺͷ���Ч�ʡ�
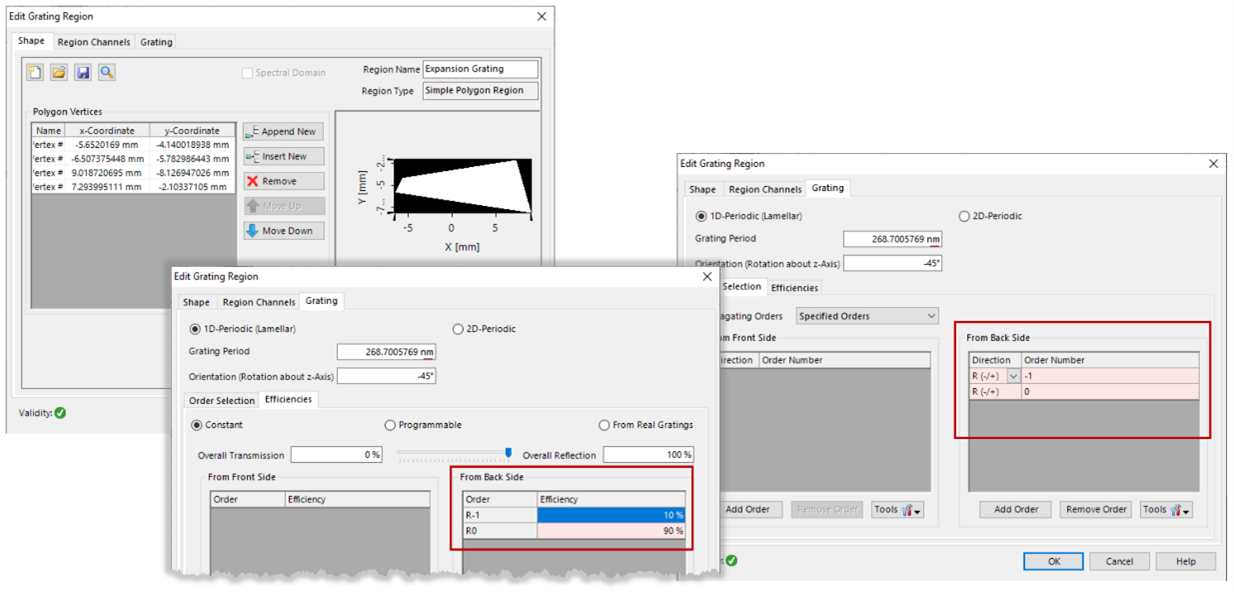
���#2�����ζ�߅�΅^���еĔUɢ���
�Uɢ��ű����x��һ����߅���Π�ą^���С�����^��ͨ����‒//+�����ָֻ�����䵽��ű���Ĺ�ķ��伉�Ρ�
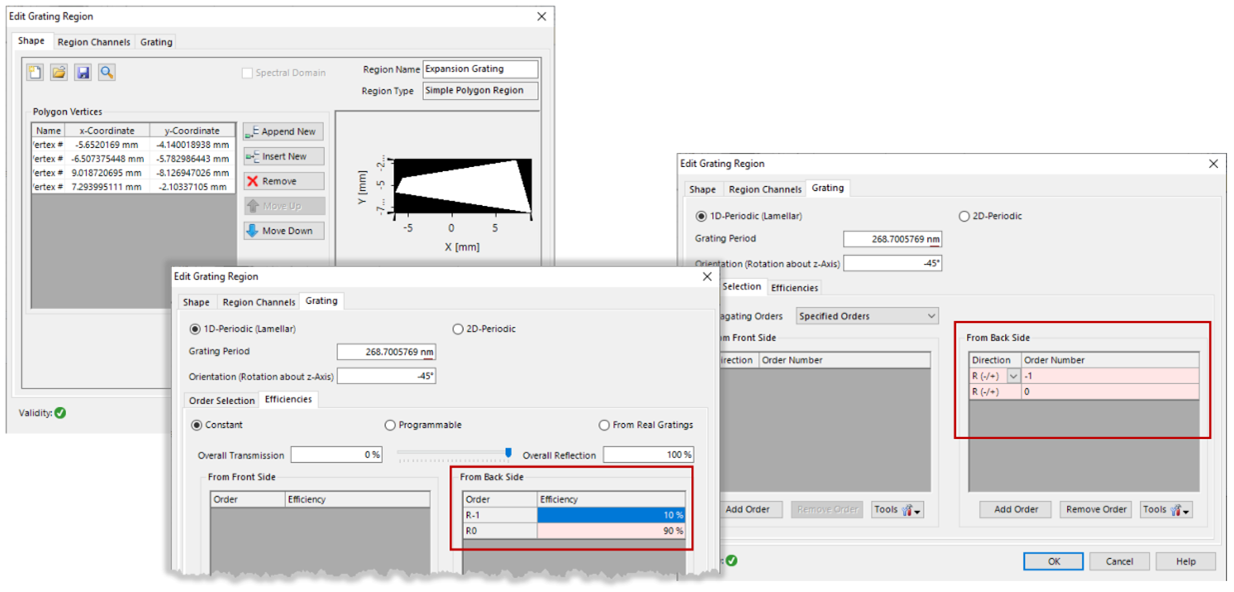
���#3��ݔ�����
ݔ����Ϲ�ű����x��һ�����΅^��ȡ�
�^��ͨ��‒/+��‒/‒��Ҫ����ؓ؟�Uɢ��ݔ����ϵļ��Ρ�
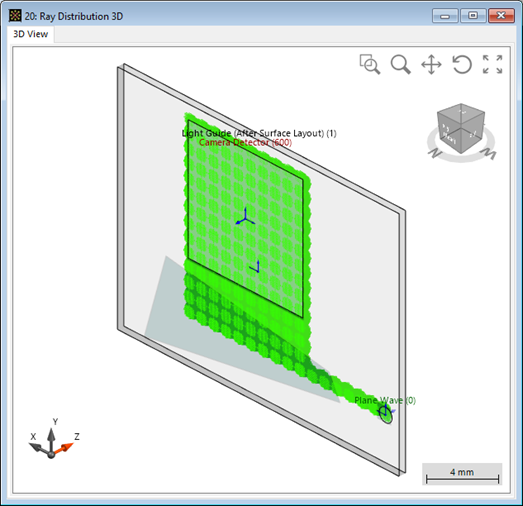
�Y�������Sϵ�y�еĹ⾀�E
��ҕ�����ĽǶȵ�ϵ�yҕ�D�⾀��
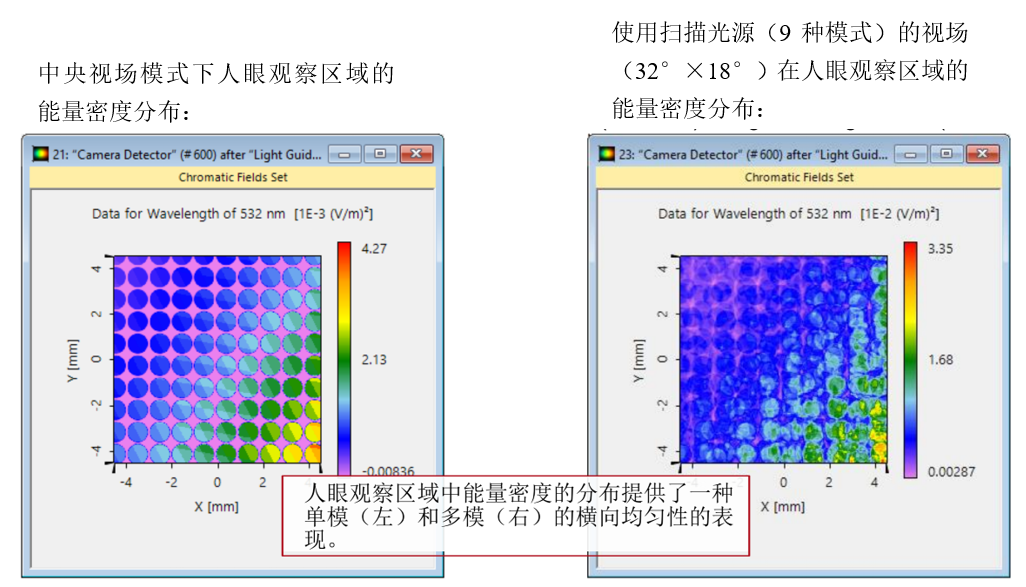
32°×18°�����Դ��9�Nģʽ����ͬ�ɫ��ݔ���ϵ�yҕ�D�⾀��
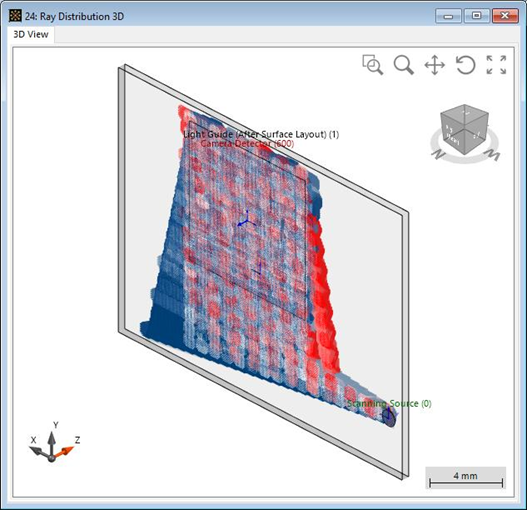
�Y�������E���挍�ɫҕ�D��
�Y��������ۙ�����ɫҕ�D��
�M��������u�r
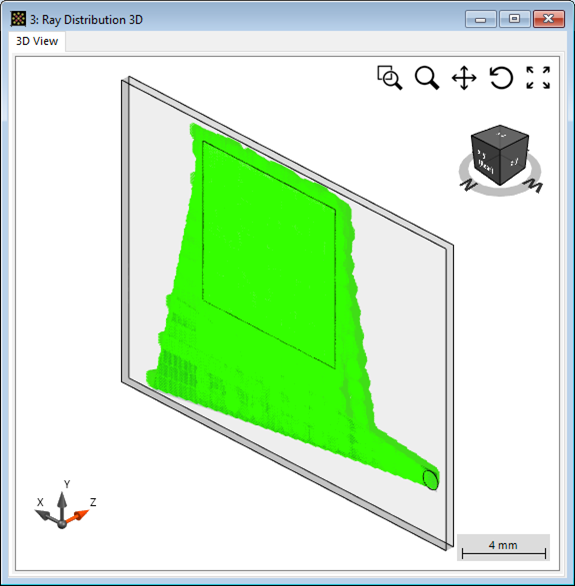
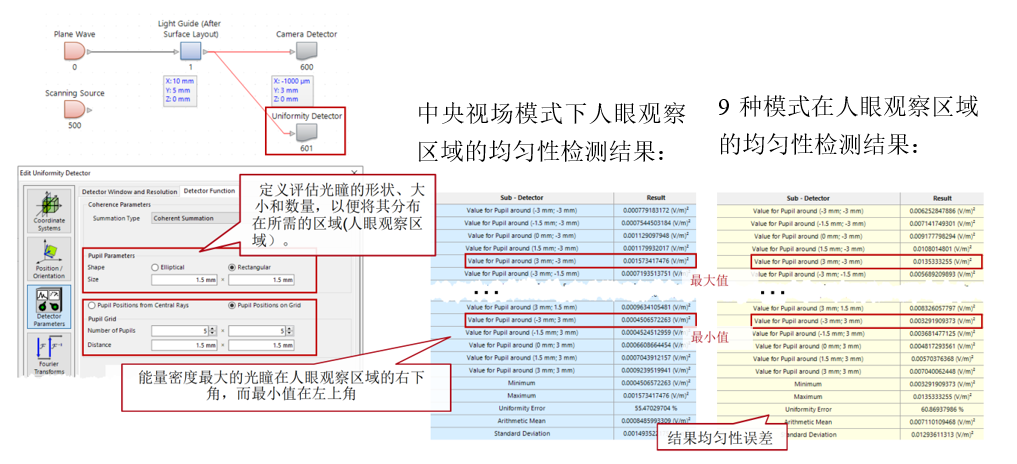
�����u�������^��^��ȵęM������ԣ��ṩ�˾����ԙz�y������������Ԫ���б����ҵ�����̽�y����Detectors��>�u�r������Merit Functions��>�����ԙz�y���£�Uniformity Detector����ԓ̽�y���܉��о����ض�λ�õ��ض��^���������^��^�ęM�������ܶȷֲ���
 |