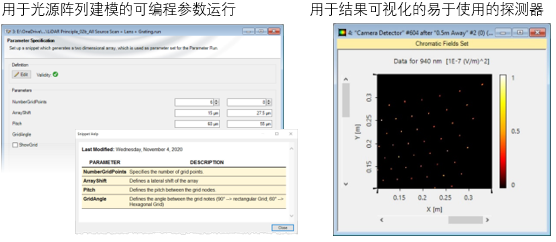
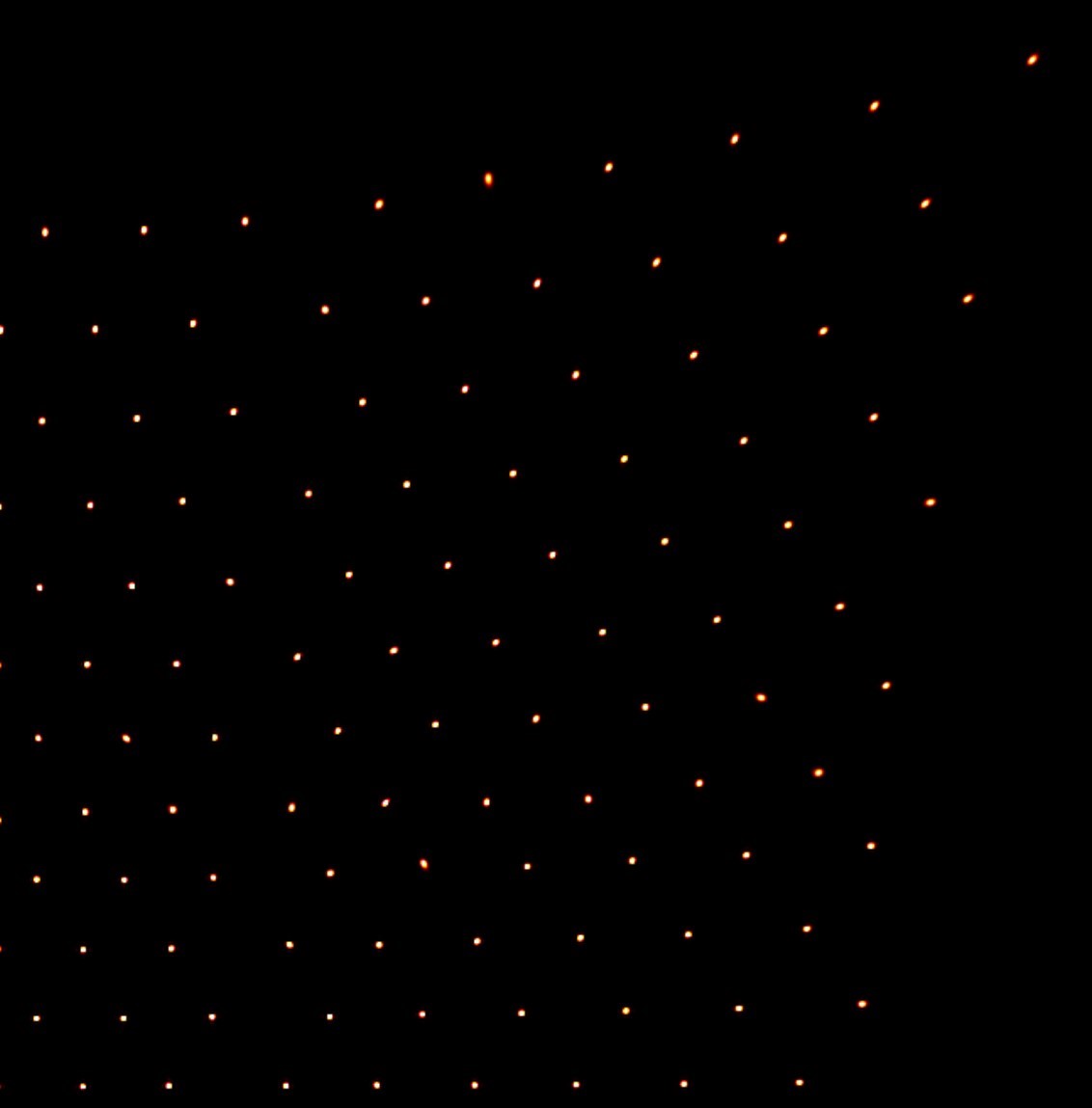
ժҪ
��������_���g���H�����ڌ��I�I���ґ��������MƷ�I������ꇼ������_��������������١��ʴ_�����S���x�z�y�͜y���������������O���еõ��ˏV���đ��á����@�������У��҂���ʾ��һ�����͵���ꇼ������_�Ĺ���ԭ����ԓ���_�ɹ�Դ��С���ֱ�Rϵ�y�Լ�����������������M�ɡ������ڿ��g�Ϳ��g�l�������M�С�
��ģ�΄�
��ģ�΄�
����Դ+��ֱ�R
����Դ+��ֱ�R
��Դ���+��ֱ�R
��Դ���+��ֱ�R+������
��Դ���+��ֱ�R+������
�����O��ע�����
��Դ��еĽ�ģ
- ��·��ֻ��һ����˹��Դ�����ÿɾ��̅����\�Ќ��F��Դ��С�
- �څ����\���ж��x�W��ÿ�θ�˹��Դ�M���Ƅӵ�һ���W���c�ϡ� k��Ŀ�ҕ��
- 늴ň�̽�y�������x��k���g�l����Ĉ��@ʾ����ęn��
- ���ˌ����нY���M���������@ʾ��һ�����������У������OӋ���ṩ��һ��VirtualLabģ�K��
(���-�M��늴ň�ģ�K.cs)
���MVirtualLab Fusion
VirtualLab Fusion��������
ͨ�^�����\���M�й�Դ��н�ģ
- �΅����\�пɾ���ģʽ�đ��� [����]
���_���O�ø����~׃�Q
- �����~׃�Q�O�� – ����ӑՓ [����]
�O�ù��ܹ��Ԫ��
- VirtualLab Fusion���g – �����ź��� [���g��Ƥ��]
VirtualLab Fusion���g
�ļ���Ϣ
������x
- ����������W��ģ���c�ͶӰ�x����ԭ����ʾ
- ���S�ǰ��S����Ԫ���f��ŵ��OӋ
- 24000�c�S�C�D����NA���������OӋ
|