������ݔϵ�y��BDS.0005 v1.0��
���O�ܼ������ʹ�ßoɫɢ�x�S�����b���M�М�ֱ������
��������
ϵ�yԔ��
��Դ
- ����ɢVIS������O��
Ԫ��
- ������ֱ�����εķ���Ԫ��������A���������R��
- ���и�˹����{�ƵĹ��@
̽�y��
- �⾀��ҕ����3D�@ʾ��
- ��ǰ��̽�y
- ���ֲ�����λӋ��
- ����������M2ֵ���lɢ�ǣ�
ģ�M/�OӋ
- �⾀�E��Ray Tracing:��������ϵ�y�A�[�Ͳ�ǰ��Ӌ��
- �Έ��E+�ͽ�����E��Geometric Field Tracing Plus (GFT+) & Classic Field Tracing����
�����̓������ι����|��
Ԫ����������ؿ��幫�����
ϵ�y�f��
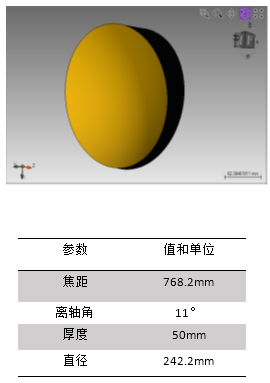
ģ�M���OӋ�Y��
 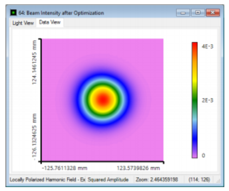
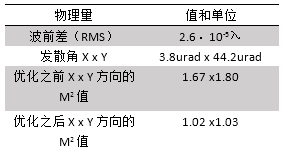
�������ȣ��ֲ� ������
��ֵ̽�y���Y��
���Y
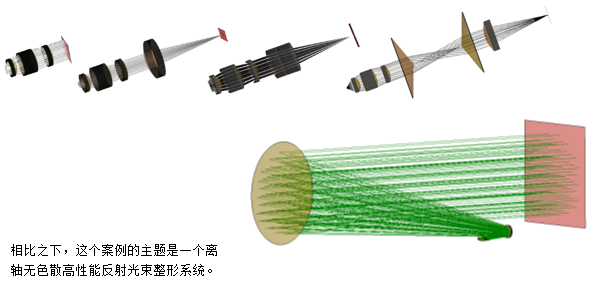
���F�ͷ����������x�S�͟oɫɢ������������b�á�
1.ģ�M
ʹ�ù⾀�E��C������������b�á�
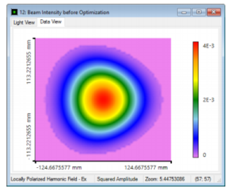
2.�u��
���ÎΈ��E+(GFT +)�����Ӌ����ֲ����u�r����������
3.����
����һ�����и�˹�Π�������Ĺ��@�ͽ�����E����탞��M2������
4.����
ͨ�^�������ؿ��_�������������ƫ���Ӱ푡�
���ڏ��s�Ĺ��������b�ã��e���x�Sϵ�y������ʹ��VirtualLab���M�и�Ч��ģ�M�ͷ�����ģ�M�^���У�������r���ò�ͬ��ģ�M���档
Ԕ������
ϵ�y����
�����ă��ݺ�Ŀ��
��BDS.0001��BDS.0002��BDS.0003��BDS.0004�����У��о������������ݔϵ�y��
Ŀ���ǜ�ֱ�����Q�ɼ�����O�ܰl��ĸ�˹������
֮���о����������ι������|����
���⣬̽ӑ���R��λ�ú̓Aбƫ���Ӱ푡�
ģ�M�΄գ�������������O��
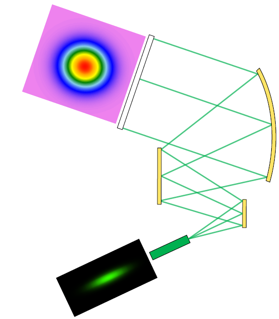
����ķ�����������b���ǻ���һ�������Rϵ�y����ϵ�y�Ƀɂ�������A�������R�R�c��������淴���R�M�ɡ����c���x���R�ӵ�λ��ȡ�Q��ݔ������İlɢ�ǡ�
Ҏ����ɢ�������
�ɼ�����O�ܰl���ď���ɢ��˹����
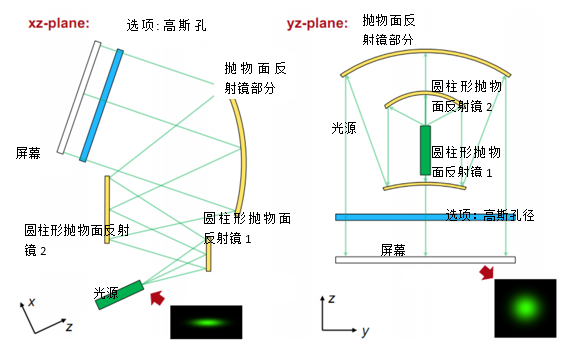
���l��^����x��y������ܰl�����Ƅ�
Ҏ�����Β����淴���R
�В��������ʵĈA���R
�������F�γ���.-1�팍�F�F�ν���
���ʰ돽���ڽ���ăɱ�
Ҏ���x�S������A���R��Ш�ͣ�
���Q�������R�^�����ڹ����Ĝ�ֱ
��VirtualLabԪ��Ŀ�ʹ���x�S�������R��Ш�ͣ�
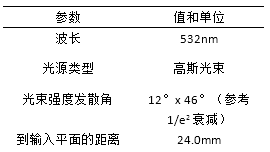
�x�S�ǛQ���˽��Ѕ^��
Ҏ����������12° x 46°������
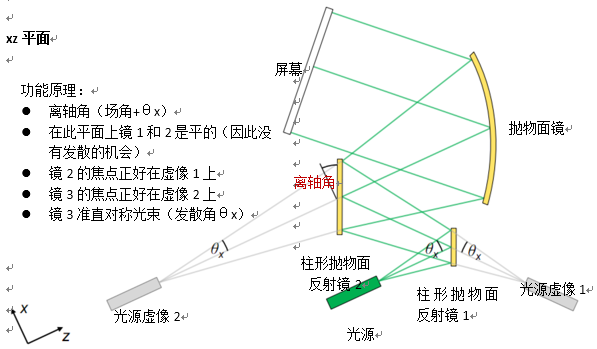
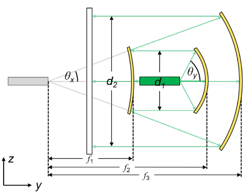
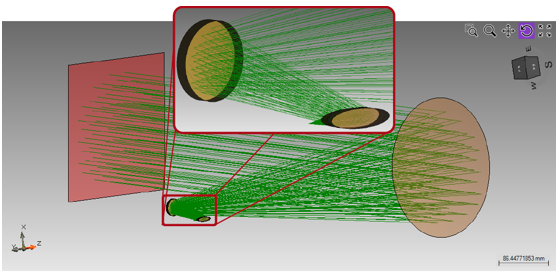
���������b�õĹ�·�D
����VirtualLab����������ϵ�y���t�H���O��z����ľ��x��
����x�S�������R��λ�������������Ľ��c����ô�������R2�ľ��xz�����ؓ�ġ�
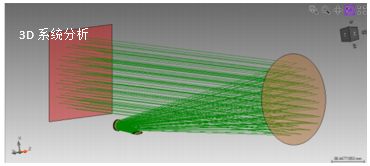
�����������ϵ�y��3Dҕ�D
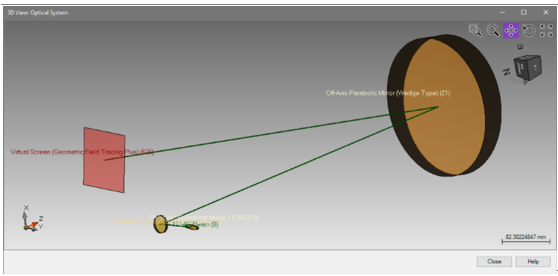
��WԪ���Ķ�λ����ͨ�^ʹ��3Dϵ�yҕ�D���@ʾ��
�G����ʾ���ɵĹ��S����VirtualLab�Ļ��A��λ�������ɣ��H�H�O���˾��xz�̓A�ǣ���
Ԕ������
ģ�M�ͽY��
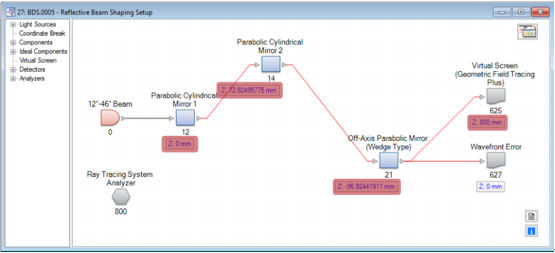
�Y����3Dϵ�y�⾀�������
���ȣ����ù⾀�E�о���ͨ�^��Wϵ�y��
ʹ�ù⾀�Eϵ�y�����x�M�з�����
file used: BDS.0005_Reflective_BeamShaper_01_RT.lpd
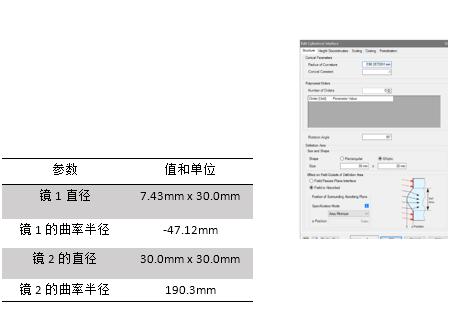
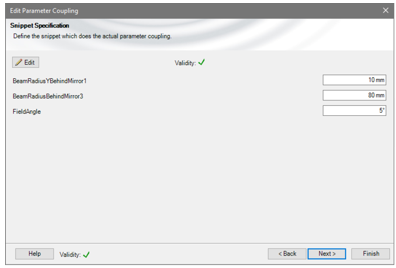
ʹ�Å�����ρ��O��ϵ�y
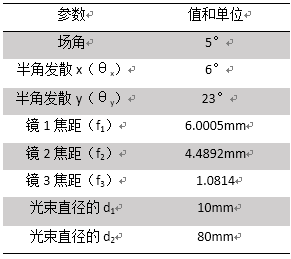
���Ʌ�����
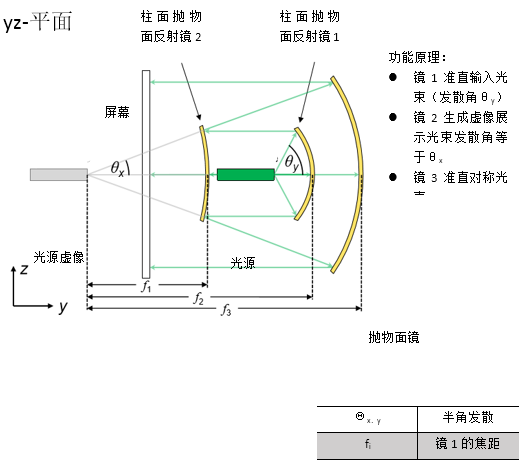
�����R1��y����Ĺ����돽
�����R2��Ĺ����돽
ҕ���ǣ��@�Q�����x�Sȡ���@Щֵ�����ȫ��׃����
���ڹ���ԭ��������ϵ�y���������x�����ֱ࣬���������ɹ�����������Ӌ�㡣
���ڴ�Ӌ�㣬������Ƕ��ą�����Ϲ��ܡ�
���Ʌ�����
�����R1��y����Ĺ����돽
�����R2��Ĺ����돽
ҕ���ǣ��@�Q�����x�Sȡ���@Щֵ�����ȫ��׃����
���ڹ����lɢ�Ǻ�ֱ����x��y�����c������Ӌ�㲢�O�÷����R��ֱ���;��xz�� |