|
1. ϵ�yԔ������
��Դ
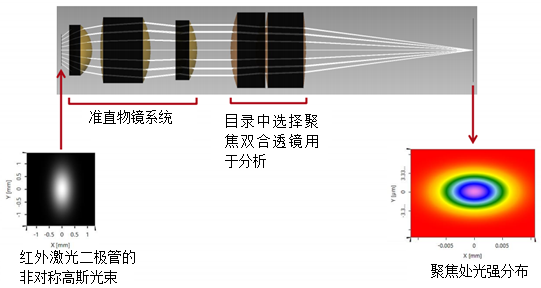
— ���аlɢ�ǵļt�⼤����O��
Ԫ��
— �����ֱϵ�y�������p���R�ľ۽�ϵ�y
̽�y��
— �c�ЈD
— ���ȷֲ�
— ��������
��ģ/�OӋ
— �⾀�E����ʼ������
— ���E���Mһ�������c�ߴ硣
2. ϵ�y�f��
3. ��ģ�c�OӋ�Y��
���������ą�������
4. ���Y
��ʹ�ù⾀�E���OӋ���R���È��E�M���Mһ��������������R���ܡ�
��һ�������ù⾀�E�M�п��ٵ��A�����ԫ@�ú��m����ʼ�c�������S����E������
�ڶ�����������Ч�����]�ڃȣ����È��E�M�о�����������
����ʾ��Ԕ������
ϵ�y����
1. ���Ì����ă���
ԓ������һ�M���Pʾ���е�һ���֣�
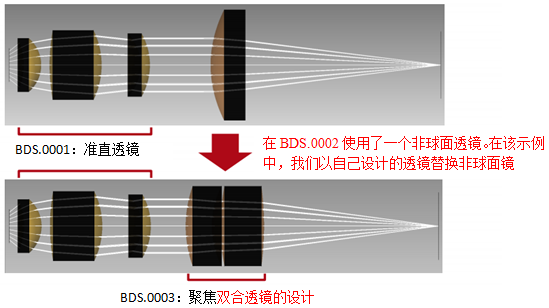
BDS.0001��BDS.0002�Լ�BDS.0003��Ҫ�P��һ������������ݔϵ�y
2. �OӋ�΄�
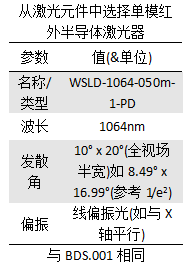
3. �������ǜ�ֱ���伤����
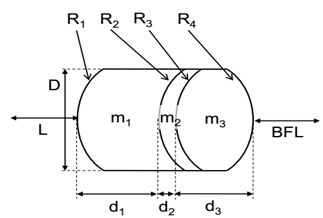
4. ��������ֱ�R�ͺ��m�⾀
5. �������p���R
(*)������2014����
����ʾ��Ԕ������
����&�Y��
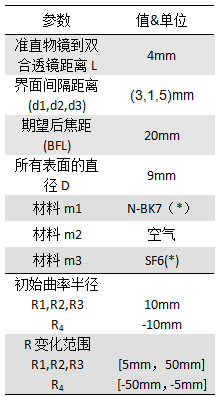
1. �����(�A�O��)
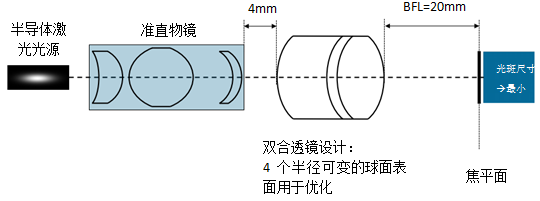
ͨ�^�p���R�ă�����ʹ�o���l���Ĝ�ֱ��������۽����R��20mm̎��
���Å��������ļ��Ԅӈ��о��п�׃���ʰ돽�ĵ������棬ֱ���@����С�ľ۽��c��
�������w�O�õĵ�һ���ֲ�׃���҂�ֱ�ӌ�Ӌ�����õĹ�ֲ������p���Rǰ������ʼ�c��
���u�r�۽���ߣ���Ŀ�˽�ƽ��̎���ù����ߴ���������̽�y����
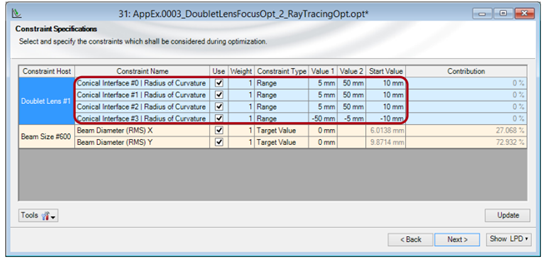
2. �⾀�E���A����
�⾀�E��������ٶȿ�ă��c��
��ˣ��҂�ʹ��VirtualLab �еĹ⾀�E�����M�е�һ���A�������S�����ý�����E���挦�Y���M�м�����
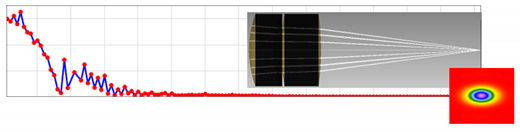
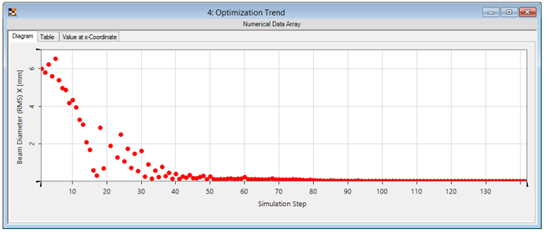
3. �⾀�E�������^��
ͨ�^�⾀�E���棬��142�������^���У�VirtualLab׃��4������İ돽�����ҵ���С���cֱ����
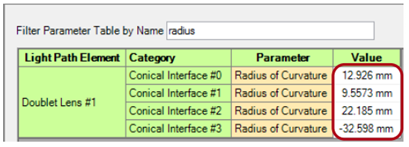
4. �⾀�E���A������ľ۽�����
VirtualLab�г��˅����Լ������ĽY����������һ�����@ʾ��4����������ʰ돽�A�����Y����
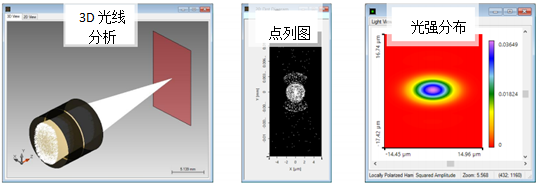
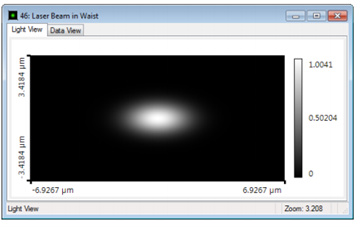
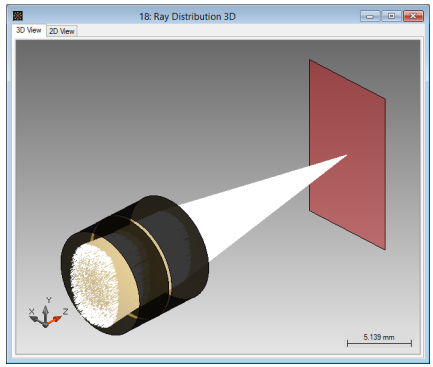
5. �⾀�E��3D�u�r
3D�⾀�Eϵ�y�������@ʾ���A�ڵľ۽�Ч��
6. �⾀�E���۽��c�ߴ�
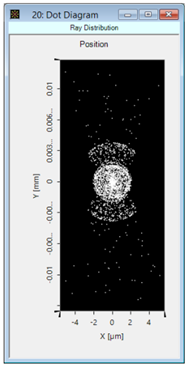
�ڹ⾀�E�����^���У��҂����ù����ߴ�̽�y���u�r��߳ߴ硣
�ɴˮa���Ĺ���ֱ����X��Y�����ϵľ�������Чֵ(ָ�����|��)��2.27µm X 2.60µm(С������O��)��
7. ���M���ɹ⾀�E�����E
����������Ч�������ڎι�W�ķ��治�܉⌍�H�ķֲ��M���u�r����
�ڽ��c�^��ȵ���r
���E������Կ��]���еIJ��ӹ�WЧ����
��ˣ������
�����E����z����M
��Ĺ⾀�E�OӋ��
8. ���E�����g�Y��
��ˣ����˸������x�ĽY�����҂��\��������W�������棬���]������Ч����ͬ�r�����û��ڵڶ�������Փ�Ĺ�������̽�y����
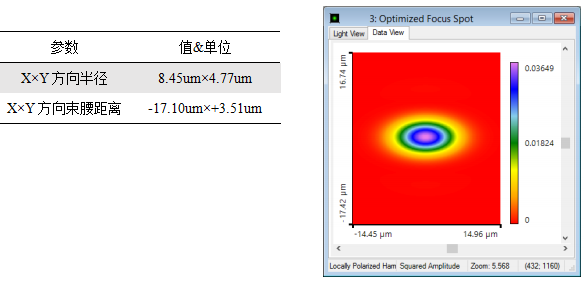
���E�Y��ֵ“�������xX×Y”�ѱ�������������Ч�����⾀�E��������ѵľ۽���ֵ�c�A�ڵľ��x20mm��ͬ��
��ˣ��҂��M�л��ڈ��E�ĵڶ��������������A������ı��攵�������ʼֵ��
9. ���E����K����
���ھ������������E�����ظ�׃���б��档��̎�҂��H��׃���һ���棬�҂���20mm�ľ��x�õ�����c��
���⣬�@�N�{ͨ���H�H�M�����ĸ�׃������҂������ʰ돽��׃��ָ��һ���^С�ķ�����
10. ���E����K�Y��
ͨ�^��������һ�����棬�҂���׃�����ӽ��ӽ�����λ�á���ˣ��۽��c�ߴ��Mһ���pС��
��ʹ�����@���͔�ֵ��(NA)�����E�܉�ʹ�҂�������K�۽��c�돽��
0.12um×0.24um(1.4%×4.8%)
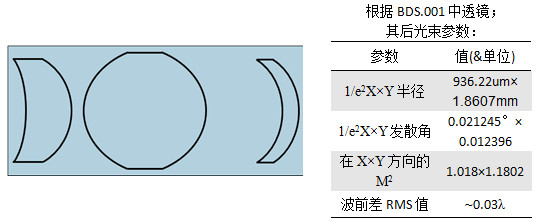
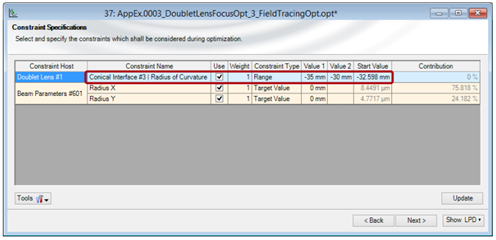
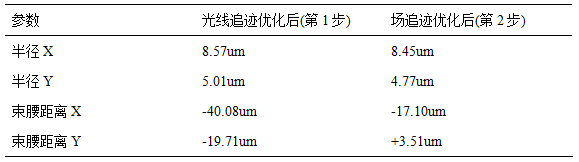
11. �Y���a��(��1��&��2��)&�돽
�څ������[���@ʾ��4���A�F�����K���ʰ돽���������p���R��
12. ���Y
��ʹ�ù⾀�E���OӋ���R���È��E�M���Mһ��������������R���ܡ�
��һ�������ù⾀�E�M�п��ٵ��A�����ԫ@�ú��m����ʼ�c�������S����E������
�ڶ�����������Ч�����]�ڃȣ����È��E�M�о�����������
13. �Uչ��x
�����ļ��o���������VirtualLab���O�úͷ�������ϵ�y�ĸ��༚��
����ҕ�l
|